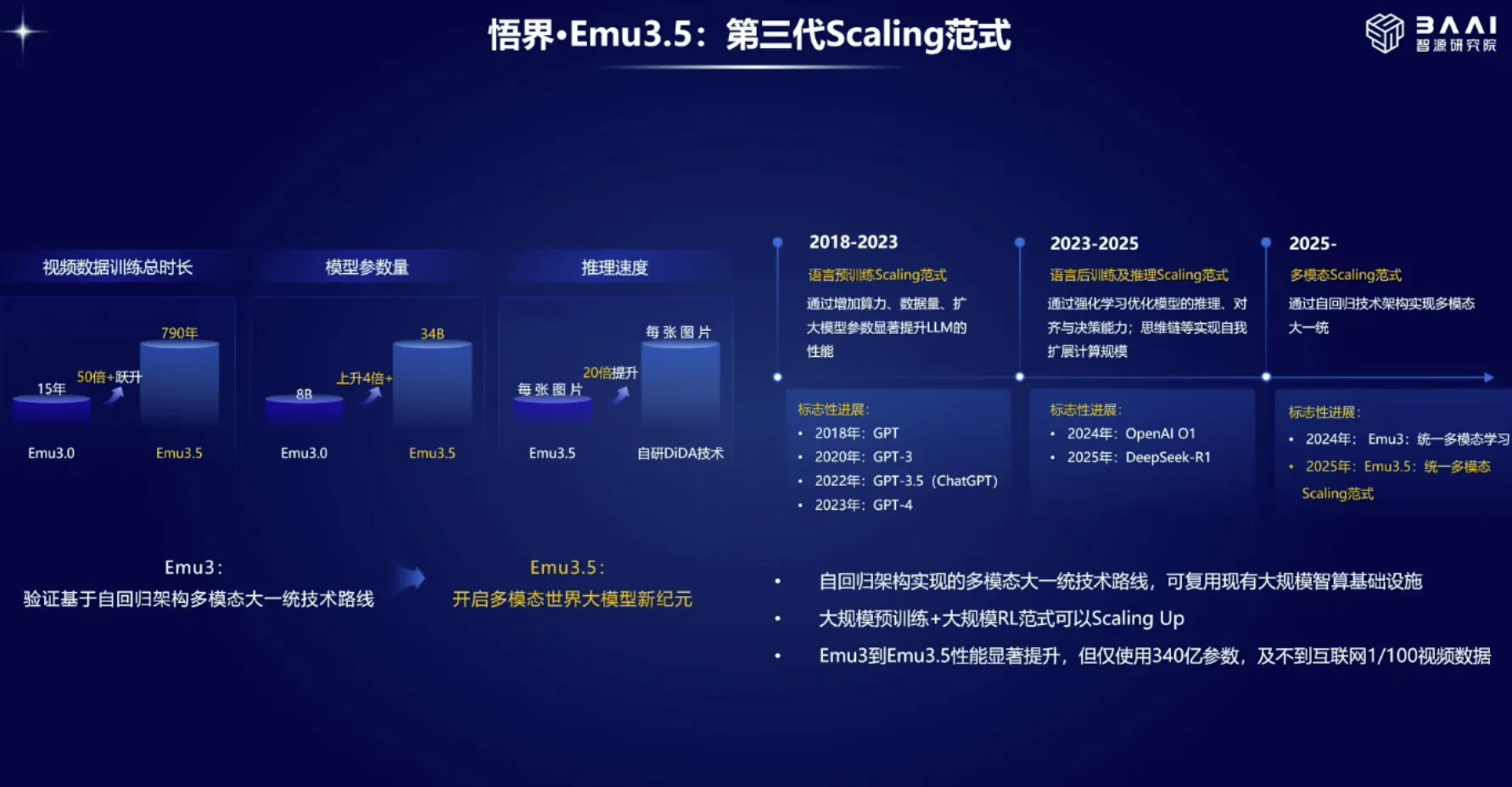
在大语言模型(LLM)的生产落地中,自回归生成的 O(N) 延迟始终是制约用户体验与系统吞吐的瓶颈。投机采样(Speculative Decoding)通过引入轻量级的“草稿模型(Draft Model)”先行生成候选 Token,再由大模型(Verification Model)进行并行校验,成为了当前最主流的加速方案。
本文将针对当前业界前沿的三种草稿模型方案——DFlash(纯并行)、DSpark(半自回归) 与 Eagle3(纯自回归) 进行深度架构剖析、技术指标对比及选型建议。
一、 核心架构与生成机制对比
三种方案的本质区别在于“生成速度(并行度)”与“草稿质量(接受率)”的权衡。以下图表直观展示了它们在计算模式上的根本差异:
graph TD
%% 样式定义
classDef flash fill:#d4edda,stroke:#28a745,stroke-width:2px;
classDef spark fill:#fff3cd,stroke:#ffc107,stroke-width:2px;
classDef eagle fill:#f8d7da,stroke:#dc3545,stroke-width:2px;
subgraph DFlash ["DFlash: 纯并行 O(1)"]
direction LR
In1[输入 Token] -->|一次性前向传播| P1[Token 1] & P2[Token 2] & P3[Token 3] & P4[Token 4]
note1[...]:::flash
end
subgraph DSpark [DSpark: 半自回归 - 带修正]
direction LR
In2[输入 Token] -->|马尔可夫并行生成| S1[候选池]
S1 -->|置信度轻量筛选| S2[高概率 Token 块]
end
subgraph Eagle3 ["Eagle3: 纯自回归 O(N)"]
direction TB
In3[输入 Token] --> E1[草稿 Token 1]
E1 -->|作为下一步输入| E2[草稿 Token 2]
E2 -->|作为下一步输入| E3[草稿 Token 3]
end
class DFlash flash;
class DSpark spark;
class Eagle3 eagle;
1. DFlash (纯并行 / 无修正)
- 机制:完全打破传统的自回归依赖。利用位置编码或修改 Attention Mask,在单次前向传播中强行“同时”预测未来多个位置的 Token。
- 特点:拥有极致的 O(1) 时间复杂度,草稿生成阶段几乎不占用时间。但由于缺乏 Token 间的显式上下文依赖,预测长度越长,准确率(接受率)崩塌越严重。
2. DSpark (半自回归 / 马尔可夫 + 置信度调度)
- 机制:介于并行与串行之间。利用轻量级的马尔可夫链(Markov Chain)或浅层 Head 快速并行产生多个候选 Token,并在其上叠加一套置信度(Confidence)评估系统。
- 特点:在 O(1) 并行生成的基础上增加了“轻量修正”过滤。系统会根据当前生成的置信度动态截断低质草稿,实现 O(1)+修正 的动态时间复杂度,在速度与质量之间取得了极佳的平衡。