6 篇文章带有标签 “physical-ai”








本周 AI 新闻 20260703
本周主线:Anthropic 双弹齐发 Sonnet 5 与 Claude Science,美团 LongCat-2.0 万亿参数模型亮剑国产算力,AI 独角兽 IPO 密集冲刺,优必选人形机器人订单破万——产业从实验室走向市场成为本周最强音。
本周看点
- Anthropic 双弹齐发:Sonnet 5 性能逼近 Opus 4.8:价格仅为前者的三分之一,Agent 能力大幅跃升,同时推出 Claude Science 科研工作台,将多智能体编排推向科学计算场景。
- 美团 LongCat-2.0 万亿参数模型亮剑:业界首个在五万卡国产算力集群上完成全流程训练的万亿参数大模型,OpenRouter 全球调用量排名前三。
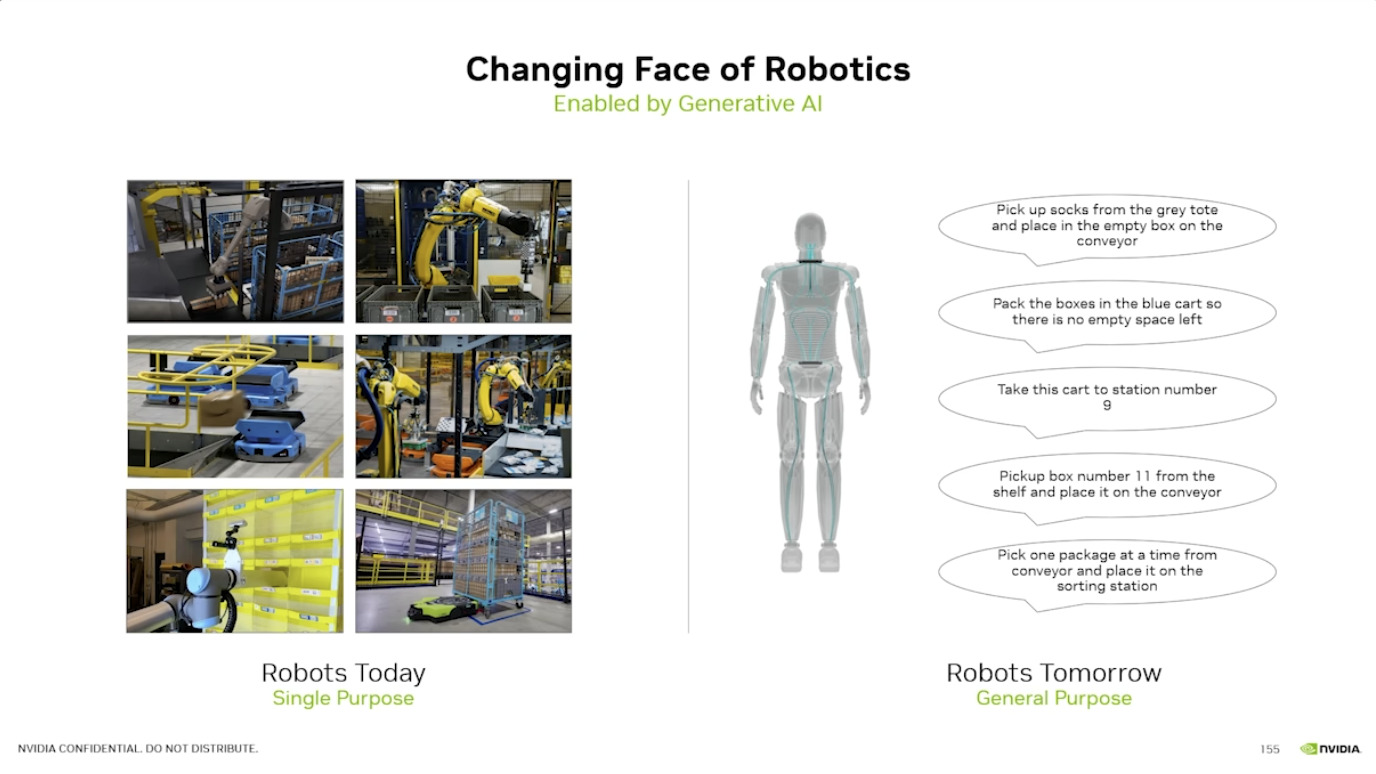
- 优必选 U1 人形机器人订单破万:消费级全尺寸人形机器人首发即获 13,361 台订单,标志着具身智能从实验室走向家庭的第一步。
- AI 独角兽 IPO 密集窗口:Momenta、宇树科技、珞石机器人等 5 家 AI 企业冲刺上市,Anthropic 以 9,650 亿美元估值抢跑 OpenAI。
- Meta 为防模型蒸馏划红线:内部限制使用 Claude Code 和 Codex,引发行业对 AI 时代「谁教会了谁」的深层讨论。
本周的六条主线——模型平权、智能体科研落地、编程工具体系化、机器人消费破冰、资本密集兑现、监管松绑——共同指向一个判断:AI 正从「能做什么」向「谁来做










NVIDIA CES 2026:物理 AI 时代来了
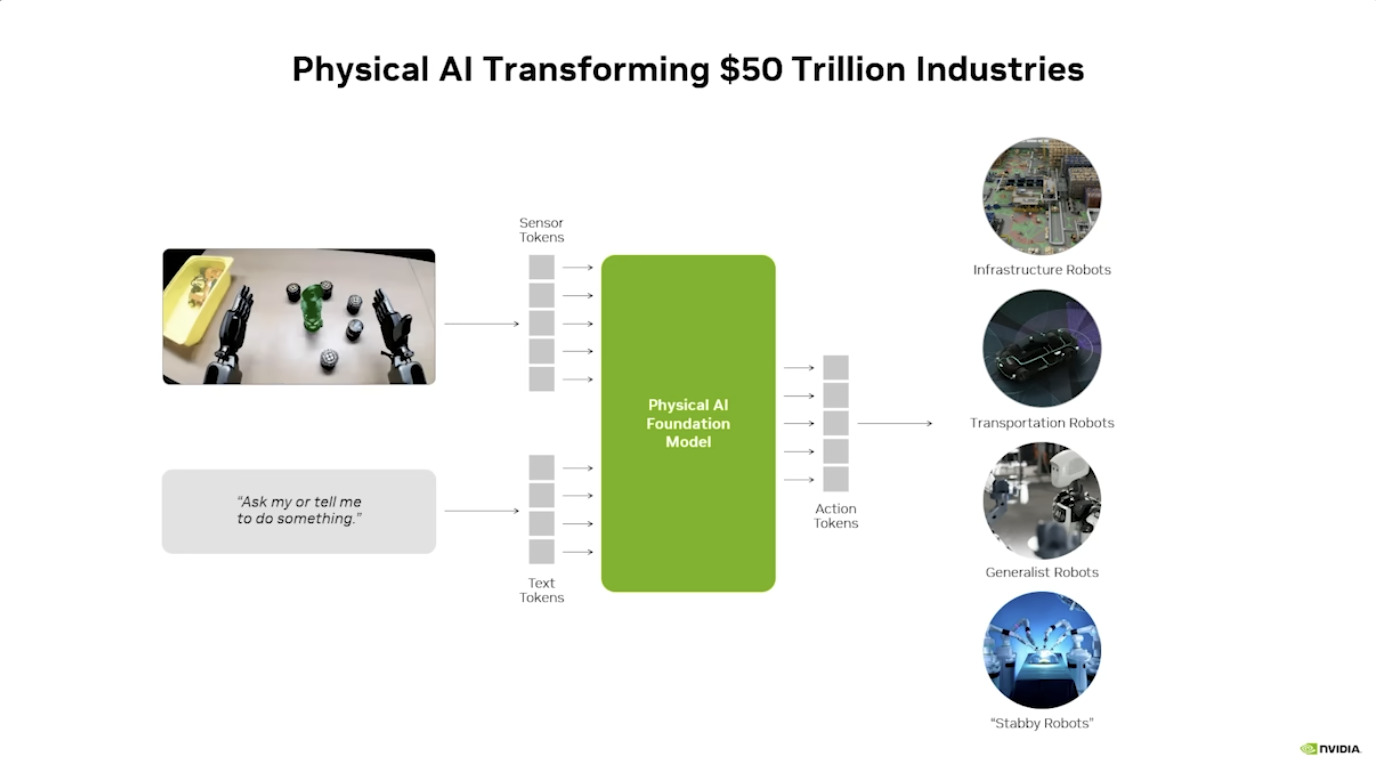
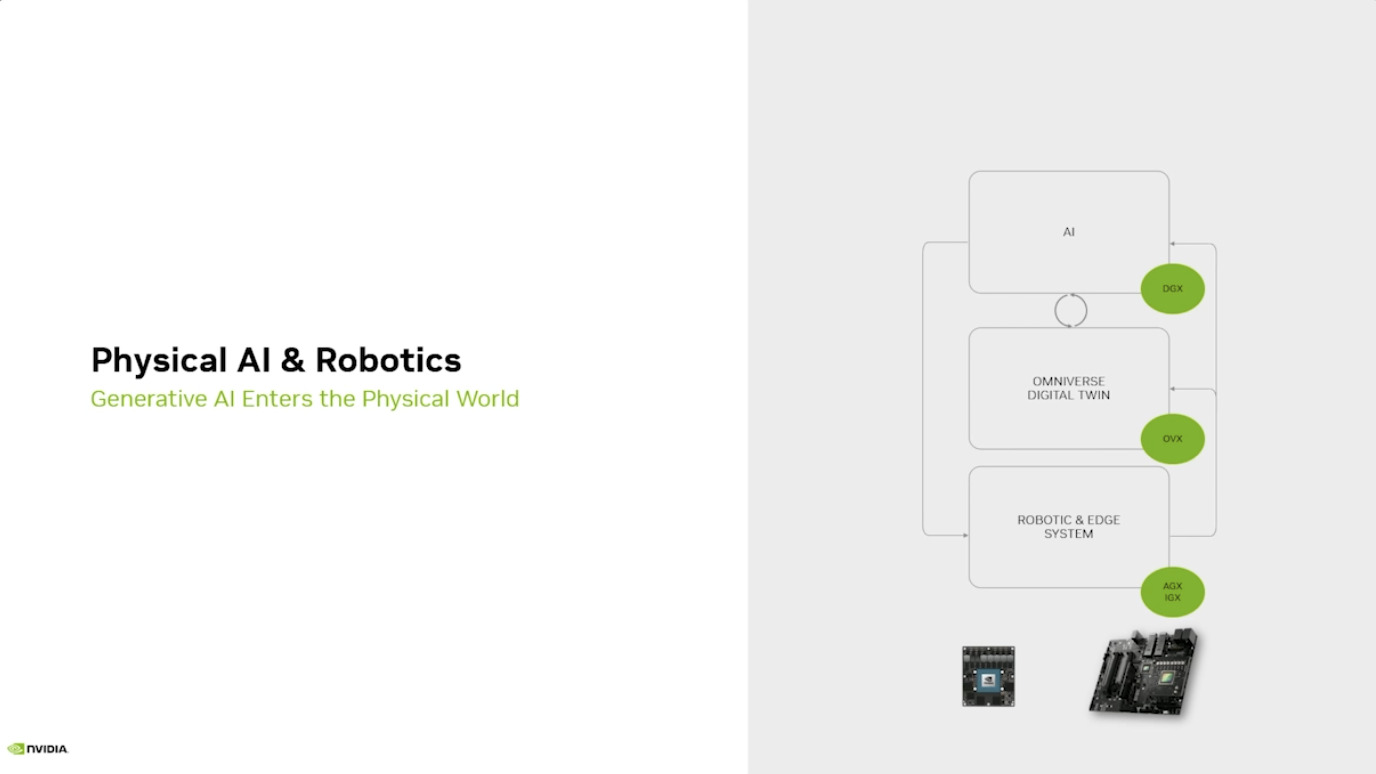
NVIDIA 正致力于打造全栈物理AI(Physical AI)平台,推动人工智能从数字领域向理解并交互物理世界跨越。该平台的核心由 Cosmos 世界模型、Omniverse 模拟环境以及针对机器人(GROOT)和自动驾驶(Alpamayo)的专属模型组成。
在硬件层面,NVIDIA 推出了突破性的 Vera Rubin 架构。其中,Rubin GPU 拥有 3360 亿个晶体管,其推理性能达到 Blackwell 的 5 倍;Vera CPU 则配备 88 个定制内核,显著提升了系统内存带宽。配合 BlueField-4 DPU 和 NVLink 6 技术,NVIDIA 构建了能够支持海量算力需求的 AI 基础设施。
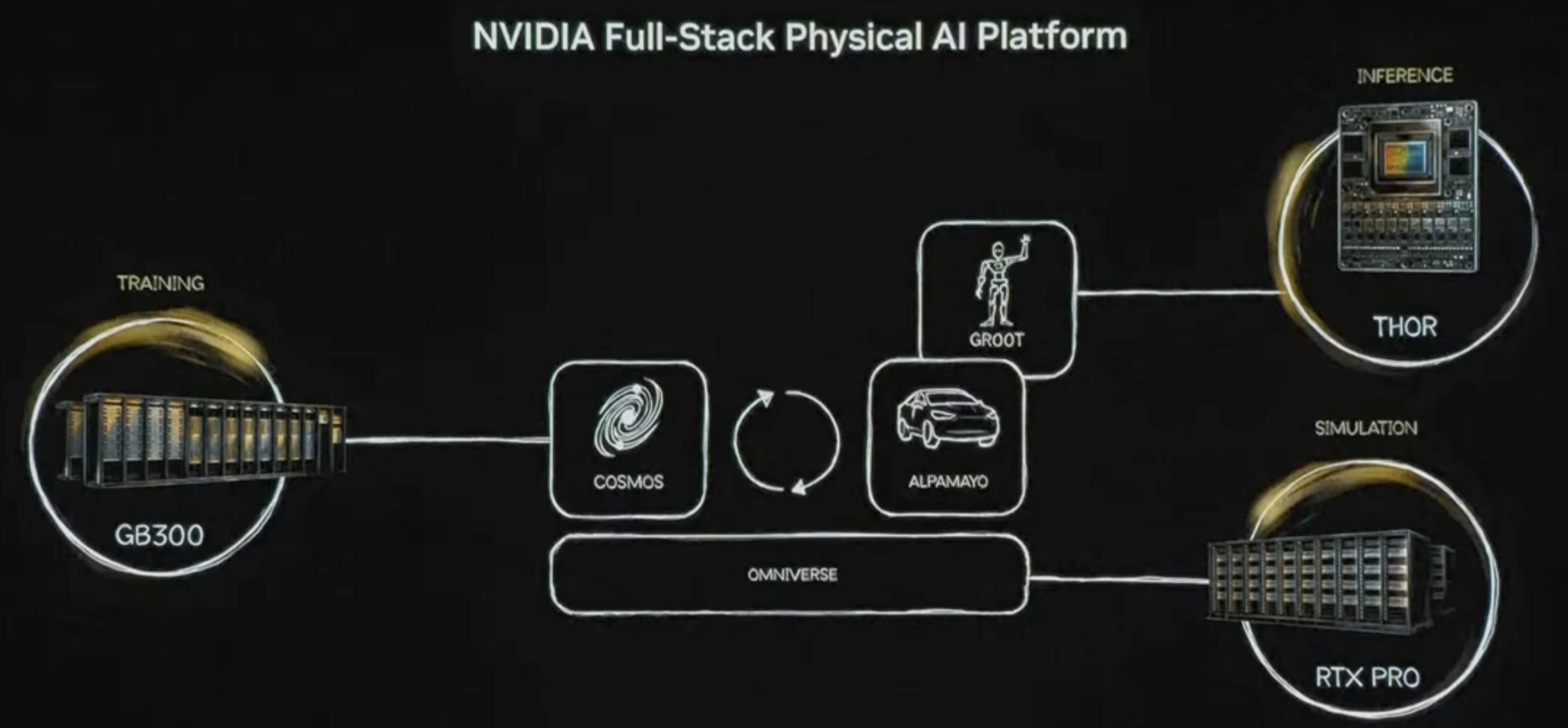
- NVIDIA Omniverse:是 NVIDIA 推出的、基于 OpenUSD 的实时 3D 开发与协作平台,核心用于构建大规模 3D 应用、工业数字孪生及物理 AI 仿真,依托 RTX 渲染与 GPU 加速,实现跨工具互操作、实时协作与高保真模拟,支持云边端灵活部署。
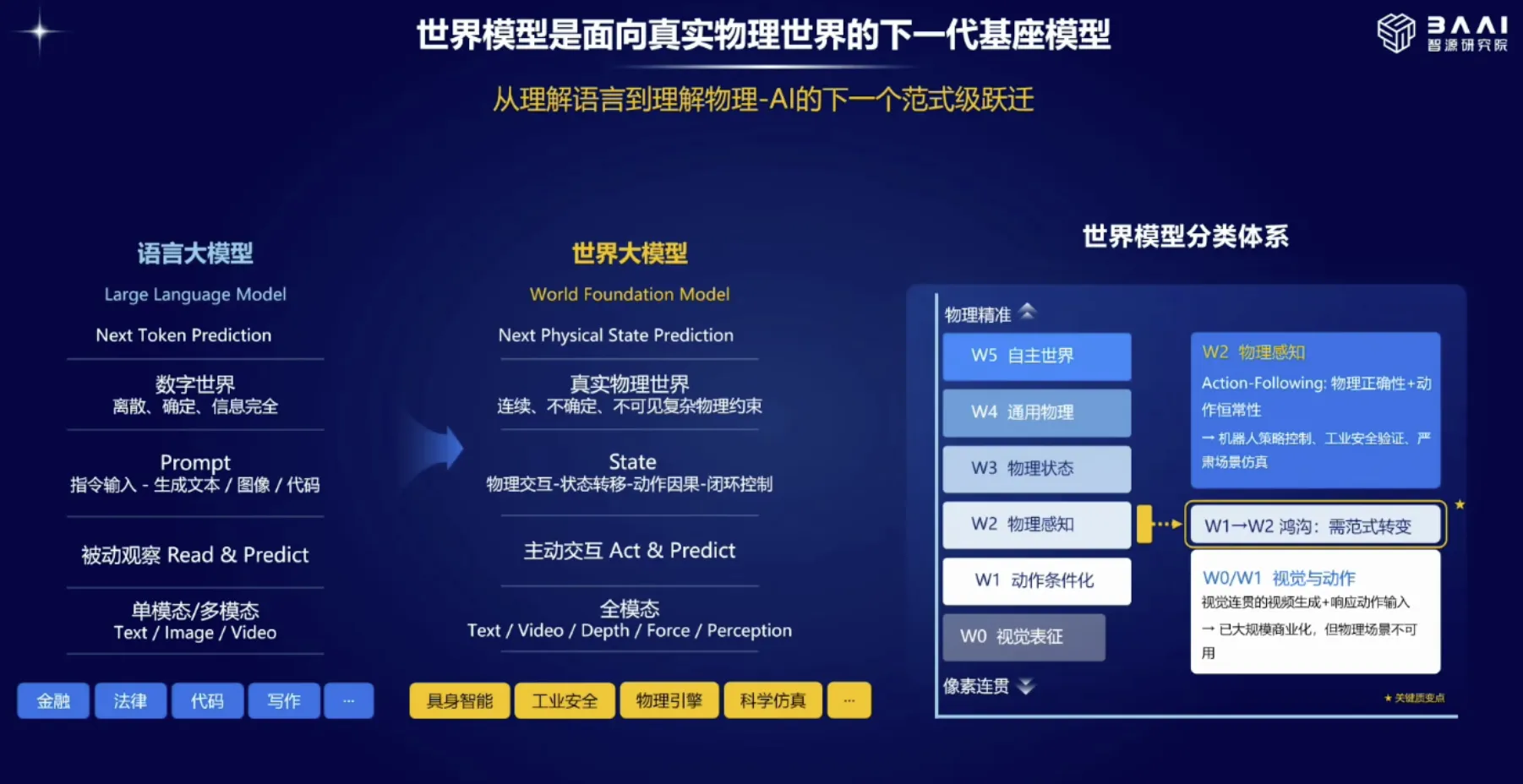
- NVIDIA Cosmos:这是一款为物理 AI 设计的世界基础模型(World Foundation Model)。它能理解物理定律(如重力、惯性、碰撞),并能将合成数据(Synthetic Data)转化为训练 AI 的高质量数据,解决物理世界数据稀缺的问题。
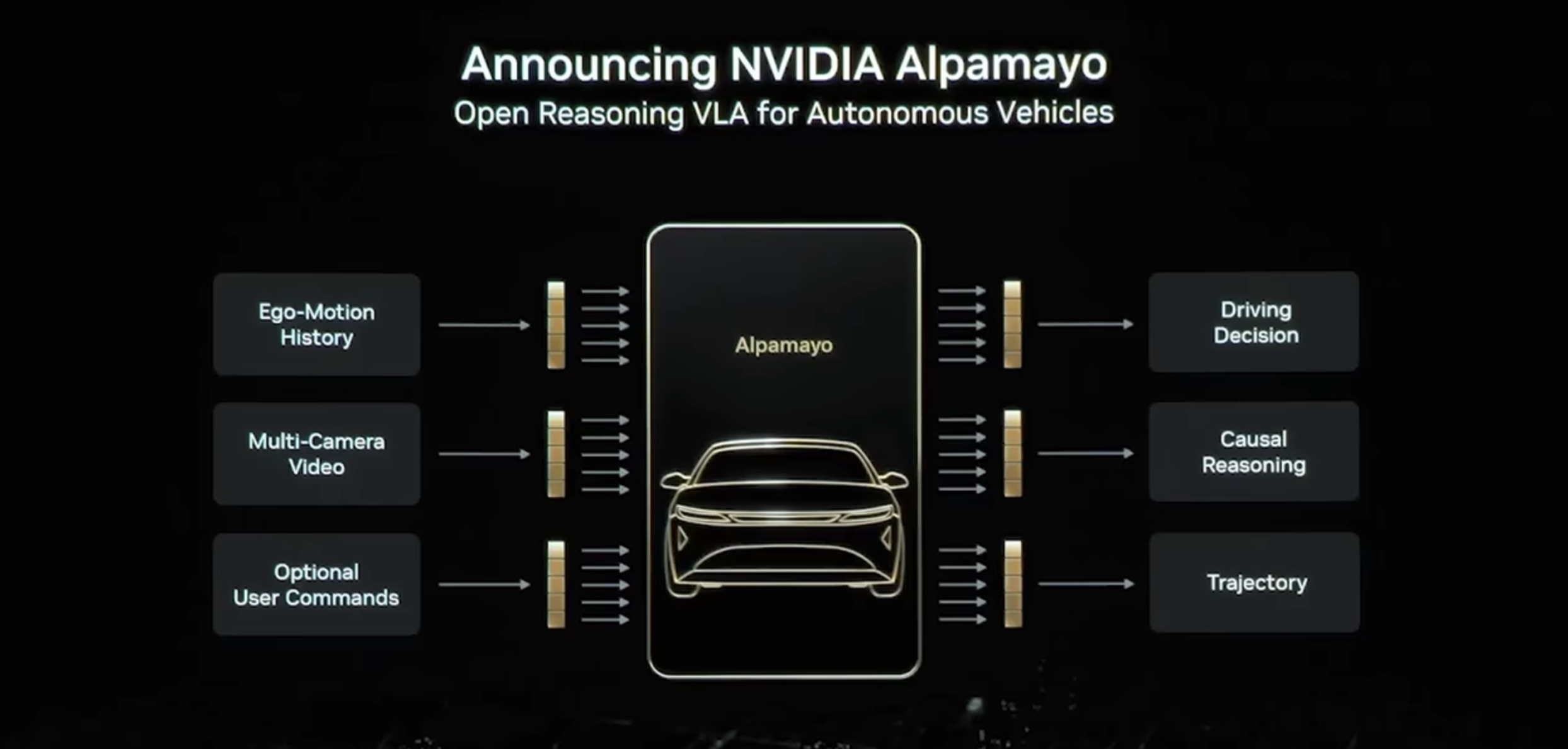
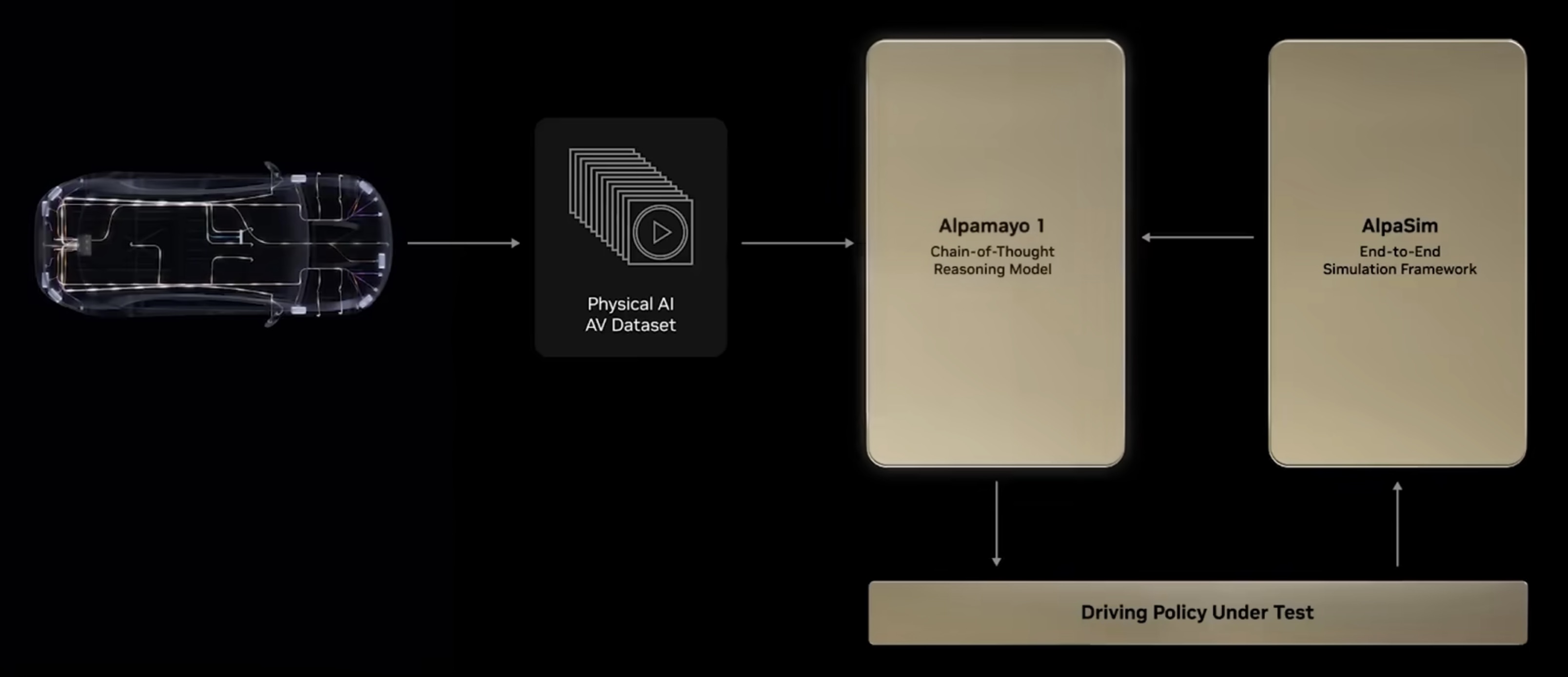
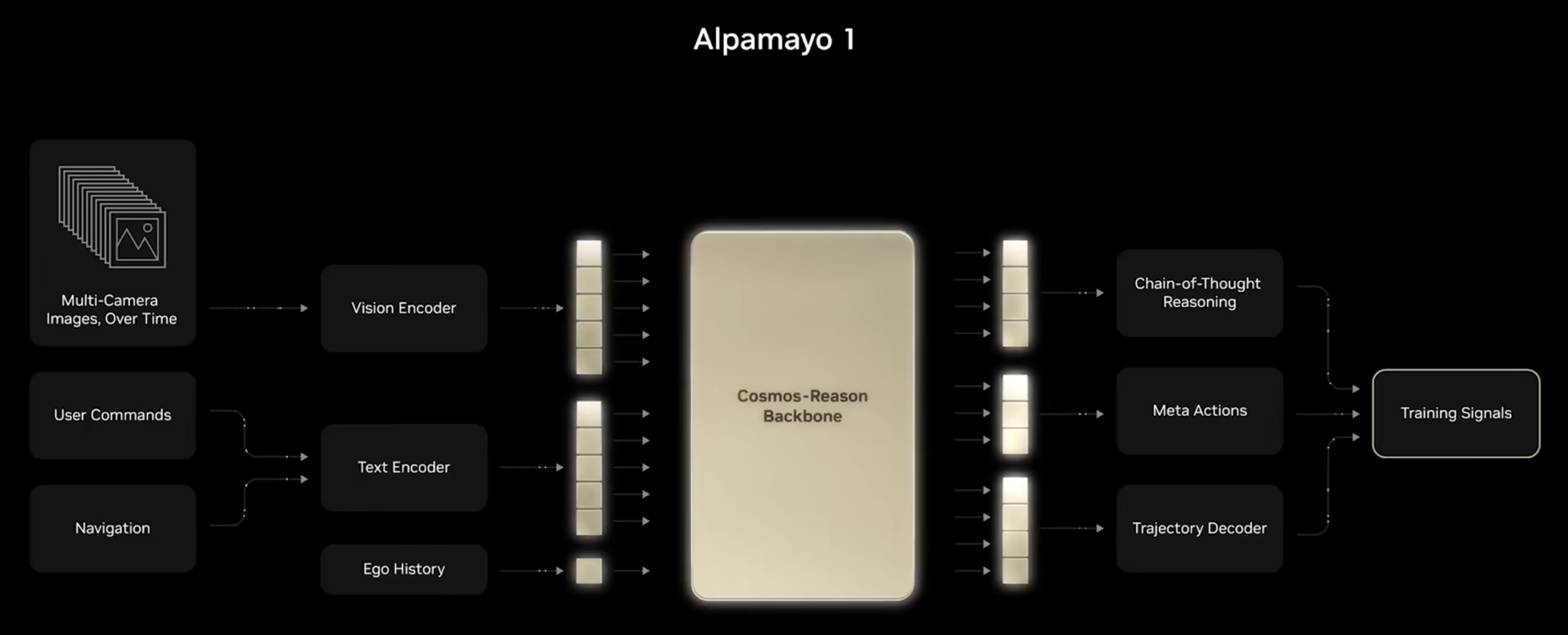
- Alpamayo:NVIDIA 发布了首个具备推理能力的自动驾驶 AI。它不仅能控制车辆,还能用自然语言解释其驾驶行为的原因,应对道路上的长尾(边缘)案例。
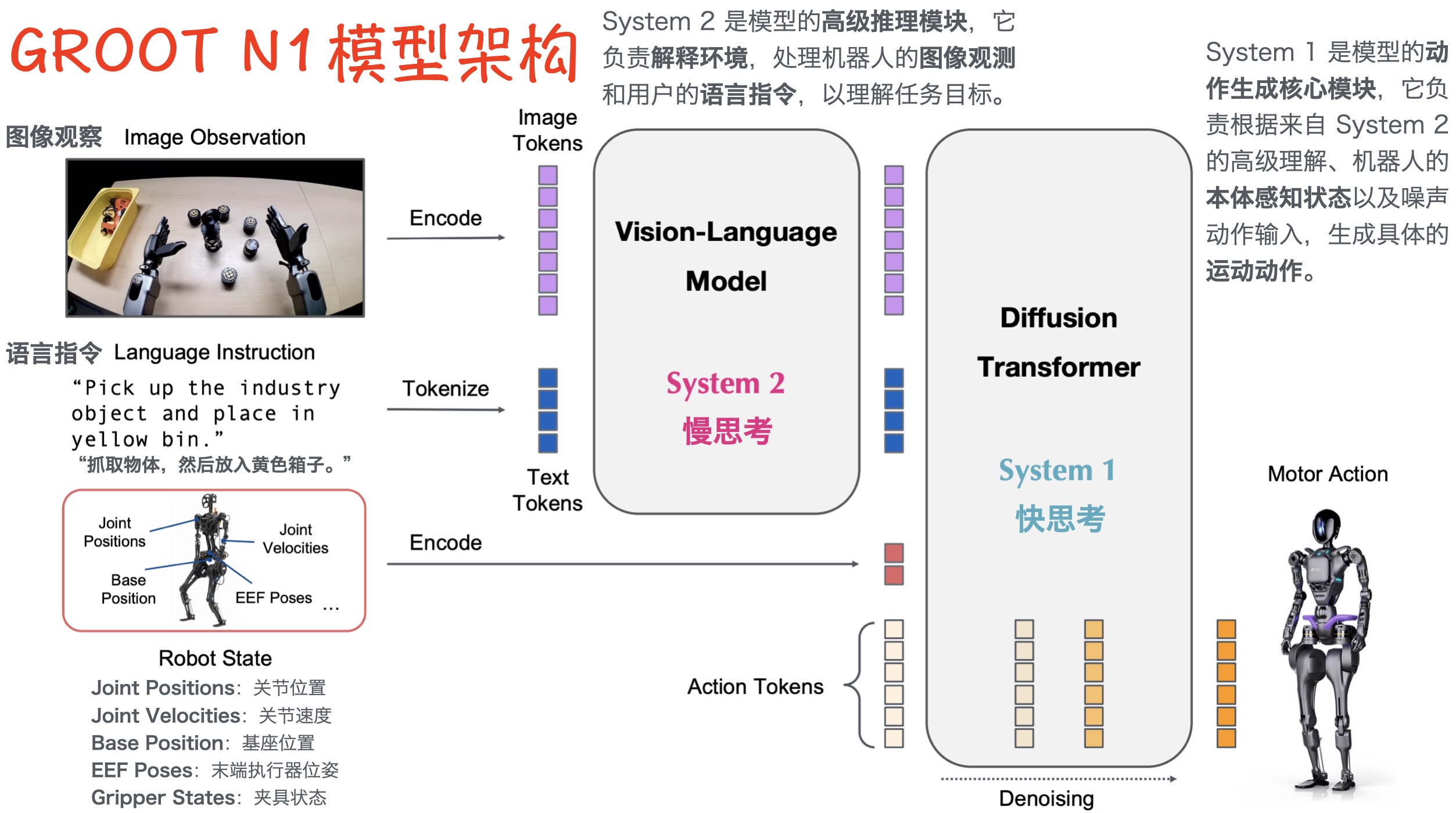
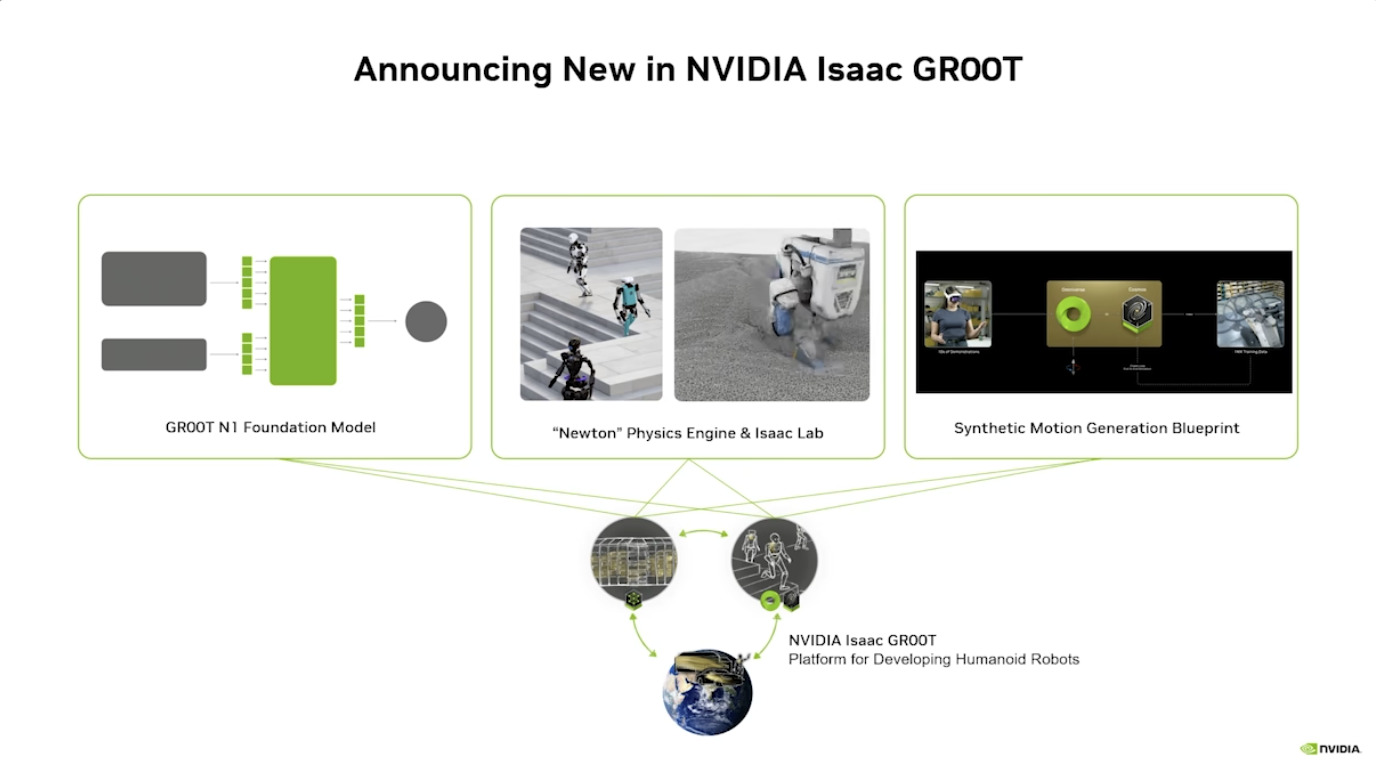
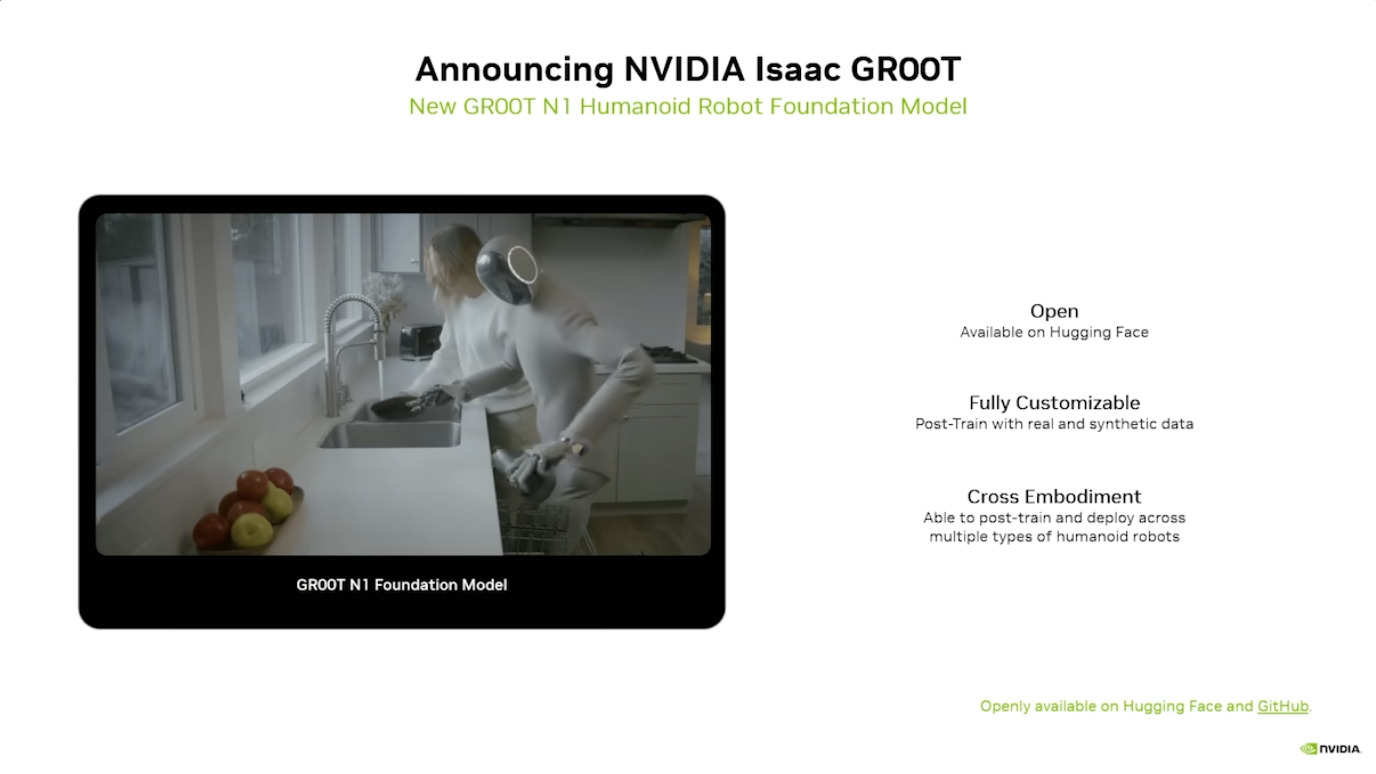
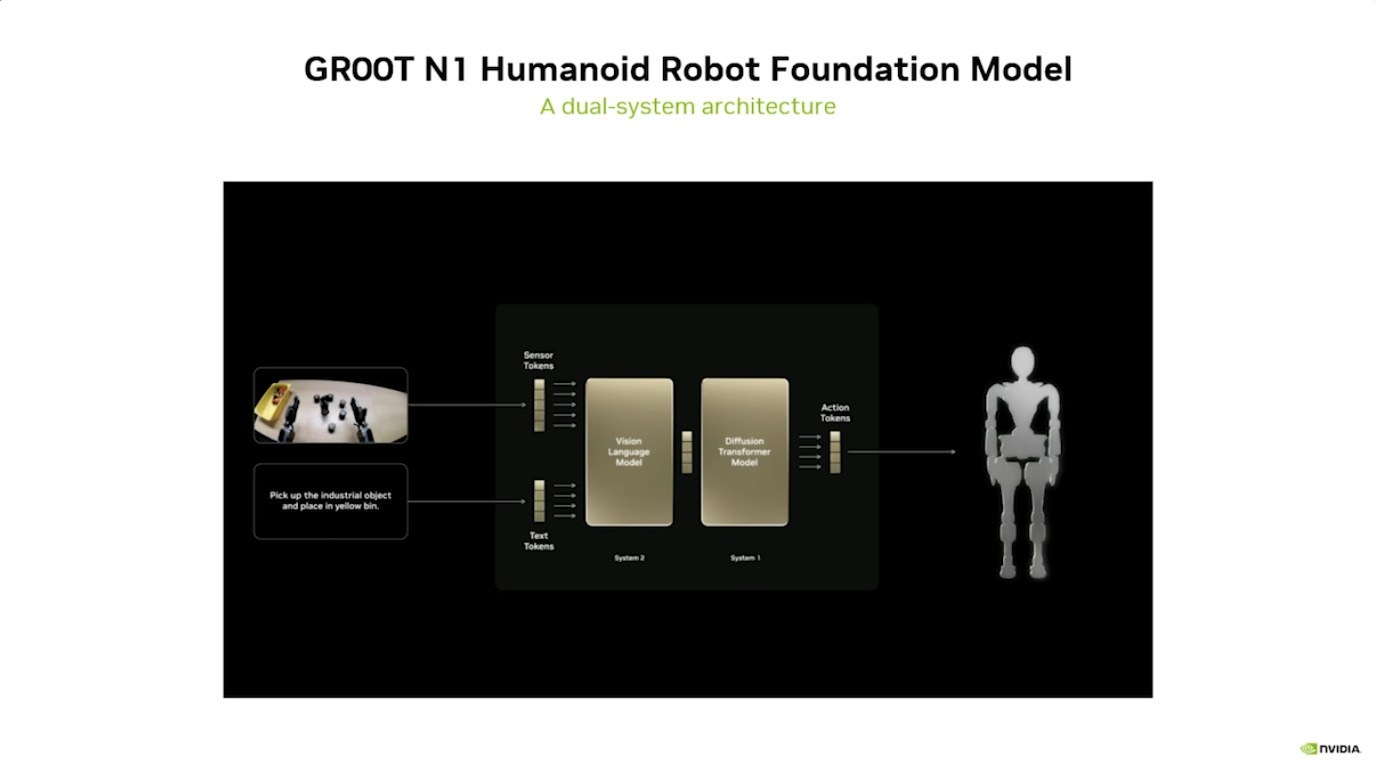
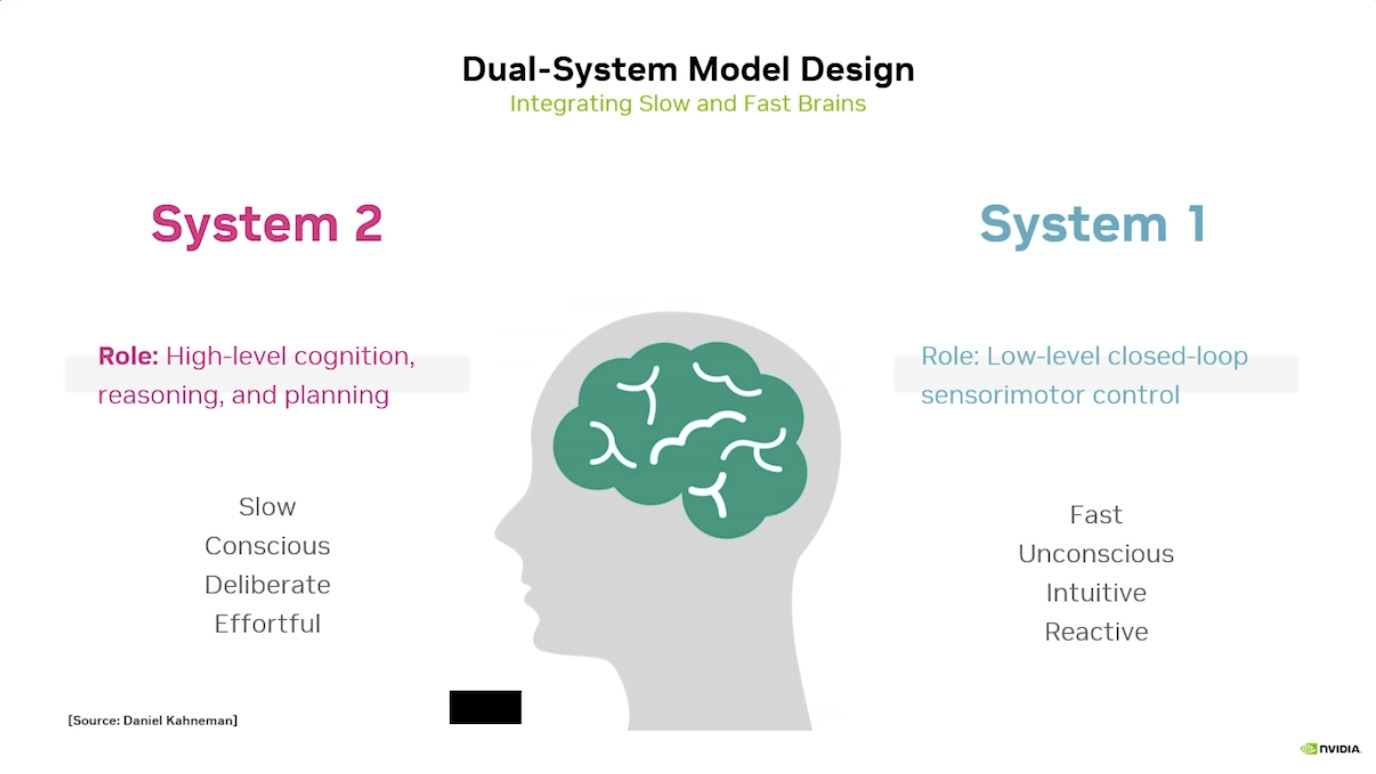
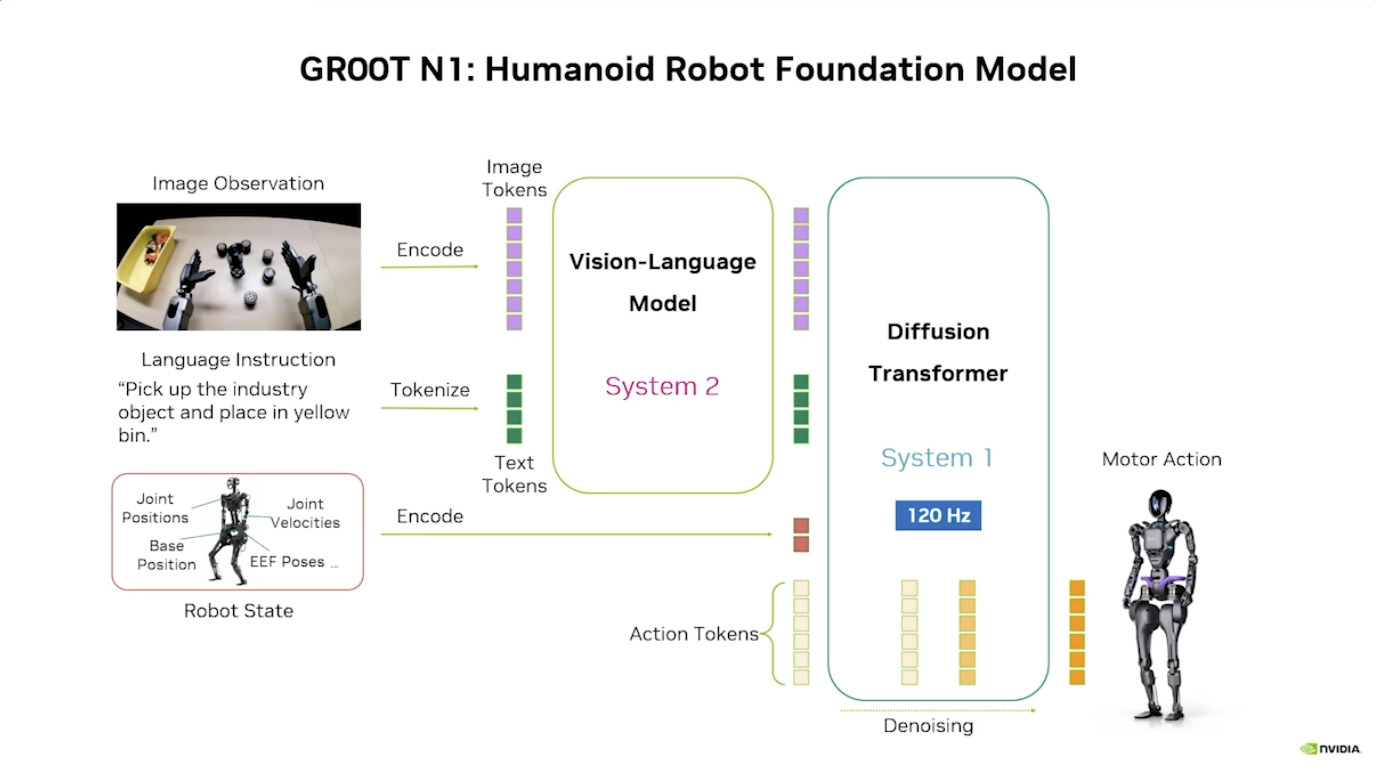
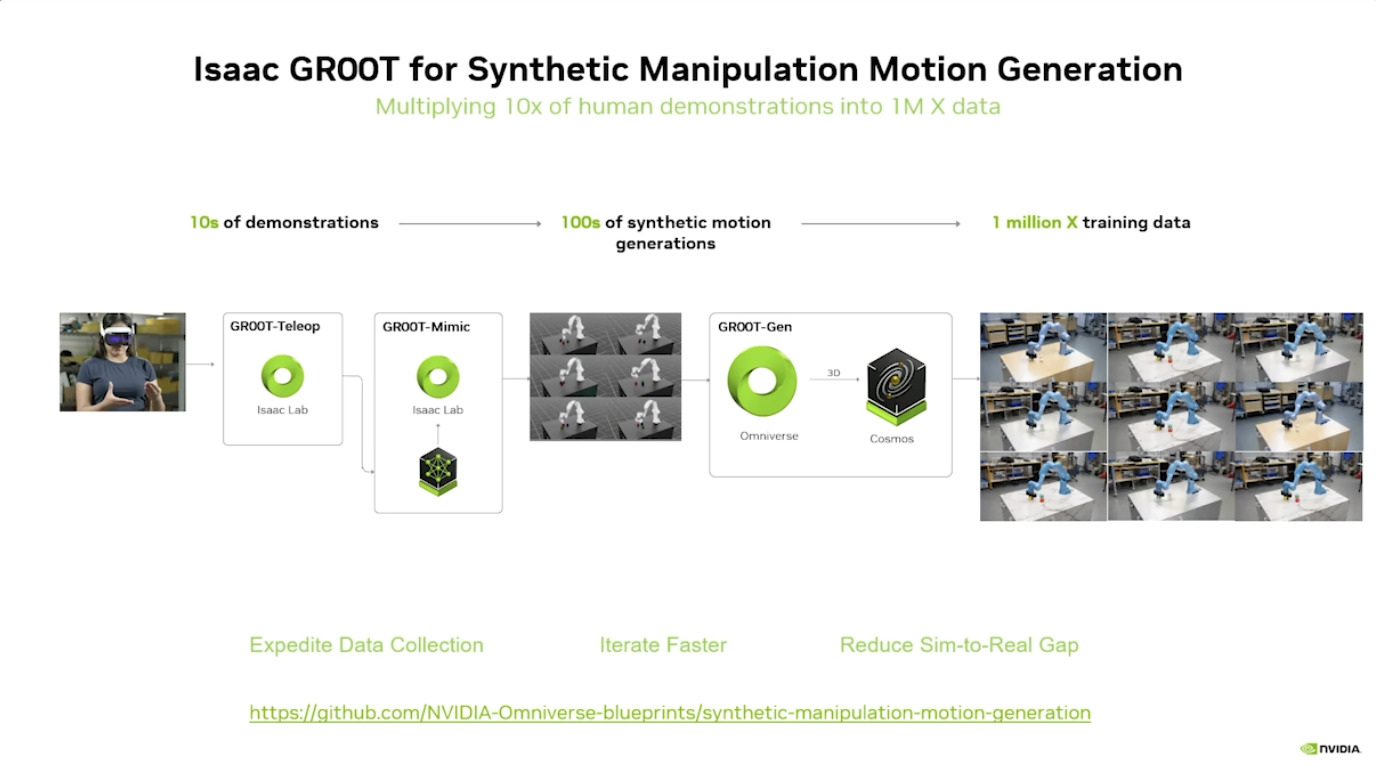
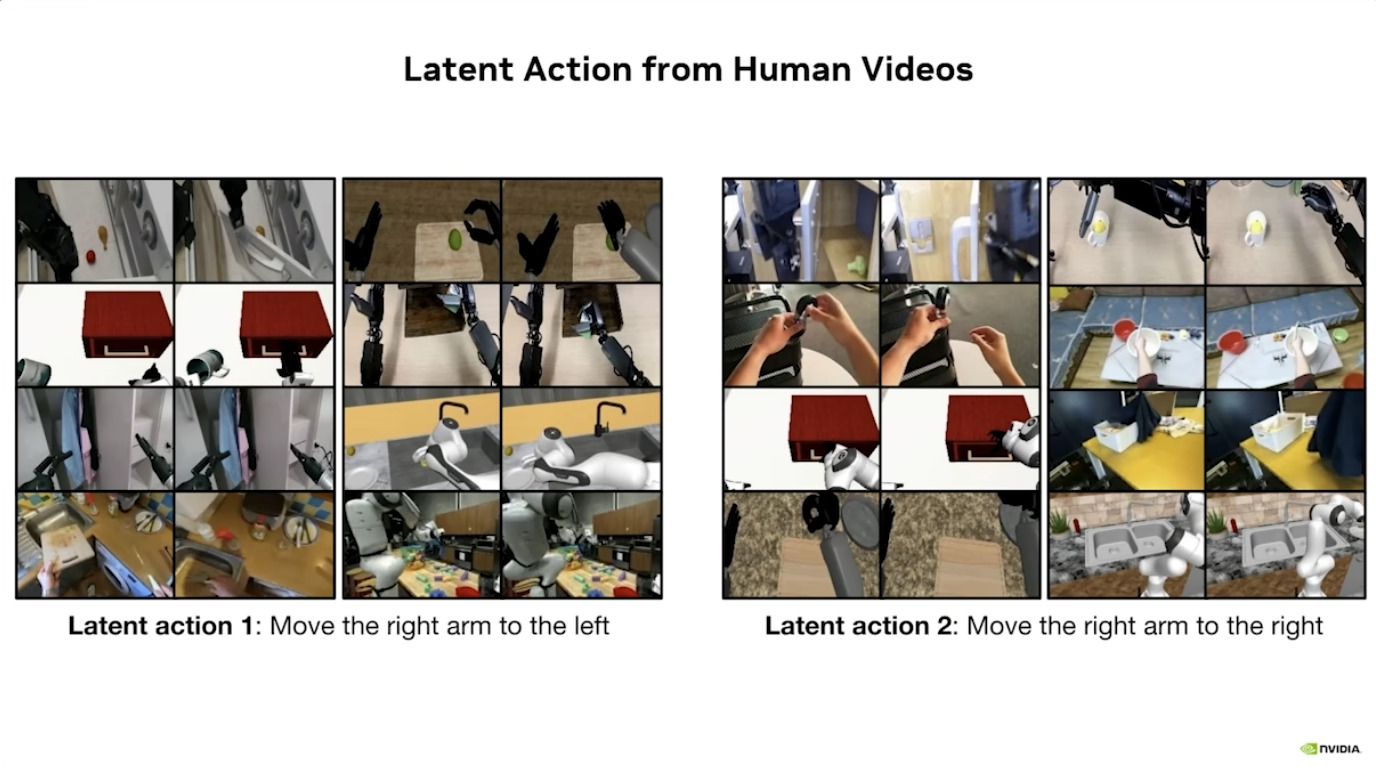
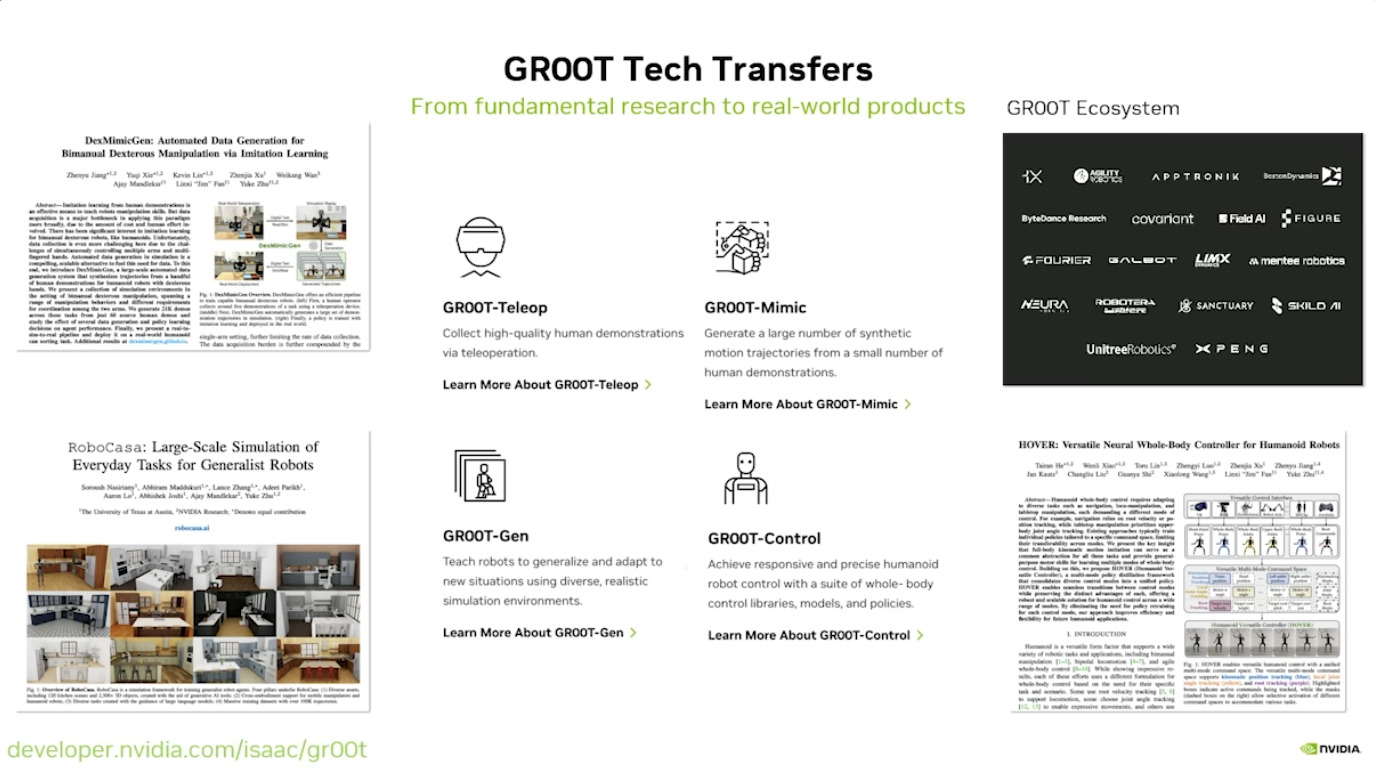
- GROOT:是 NVIDIA 面向通用人形机器人的开放基础模型体系,核心是视觉-语言-动作(VLA)端到端架构,以双系统协同实现环境理解与实时动作生成,依托 Omniverse 仿真与 Cosmos 数据平台形成机器人 “学习-仿真-部署” 闭环。
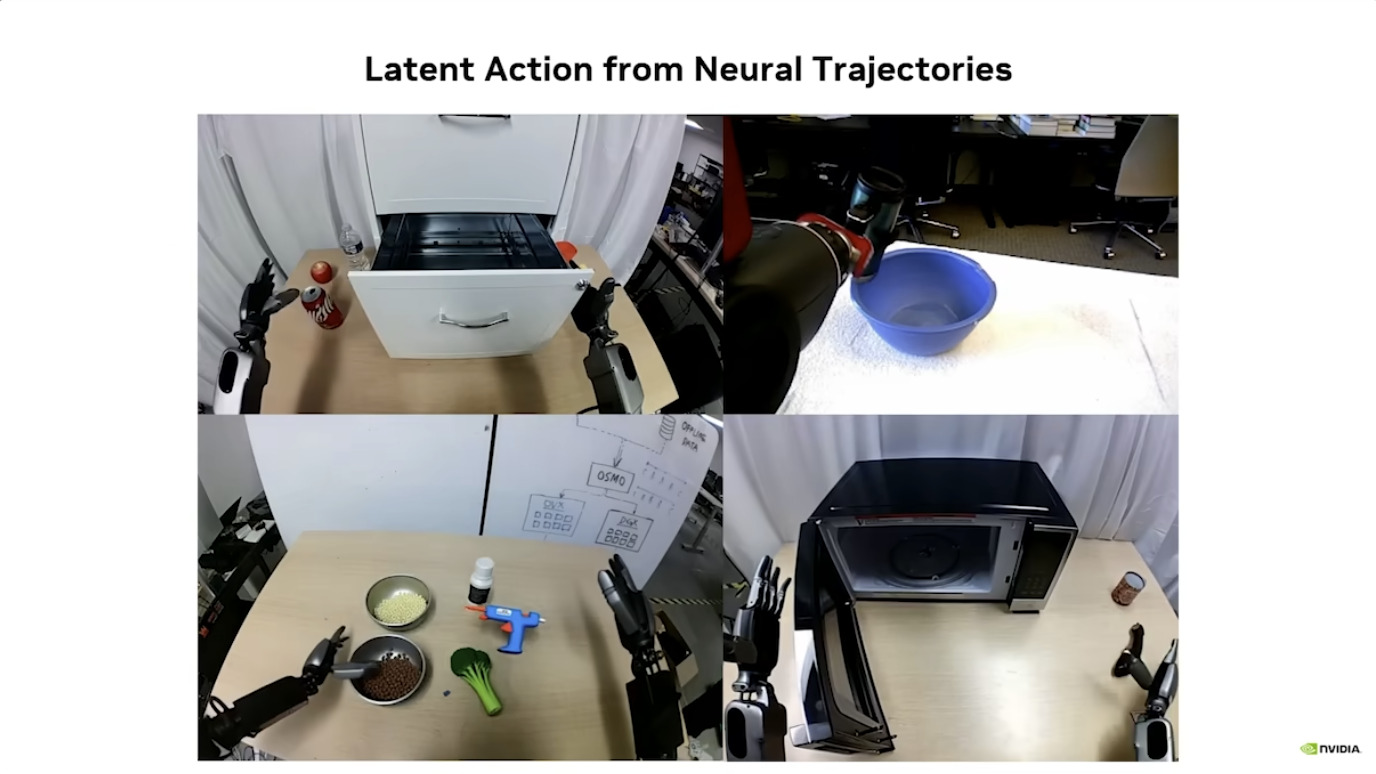
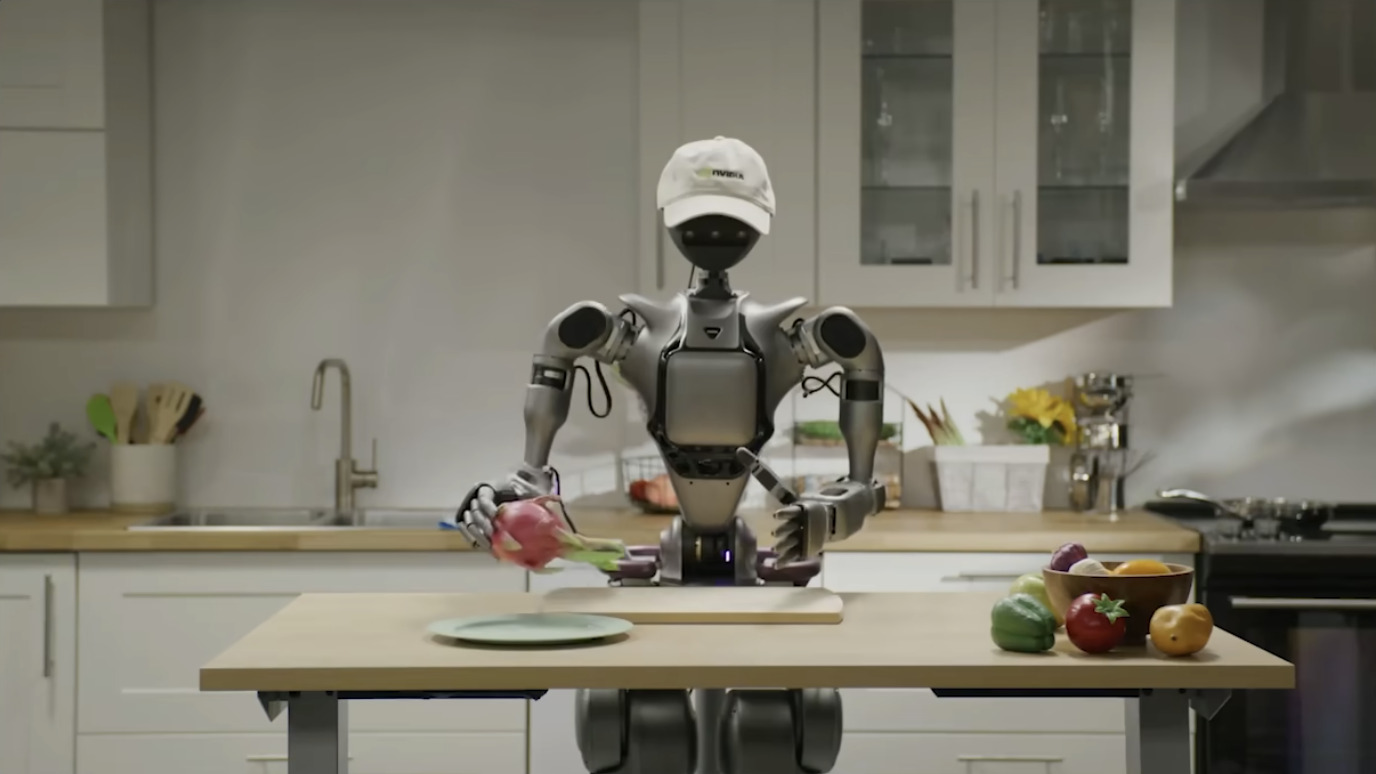
具身模型 NVIDIA Isaac GROOT N1 详解
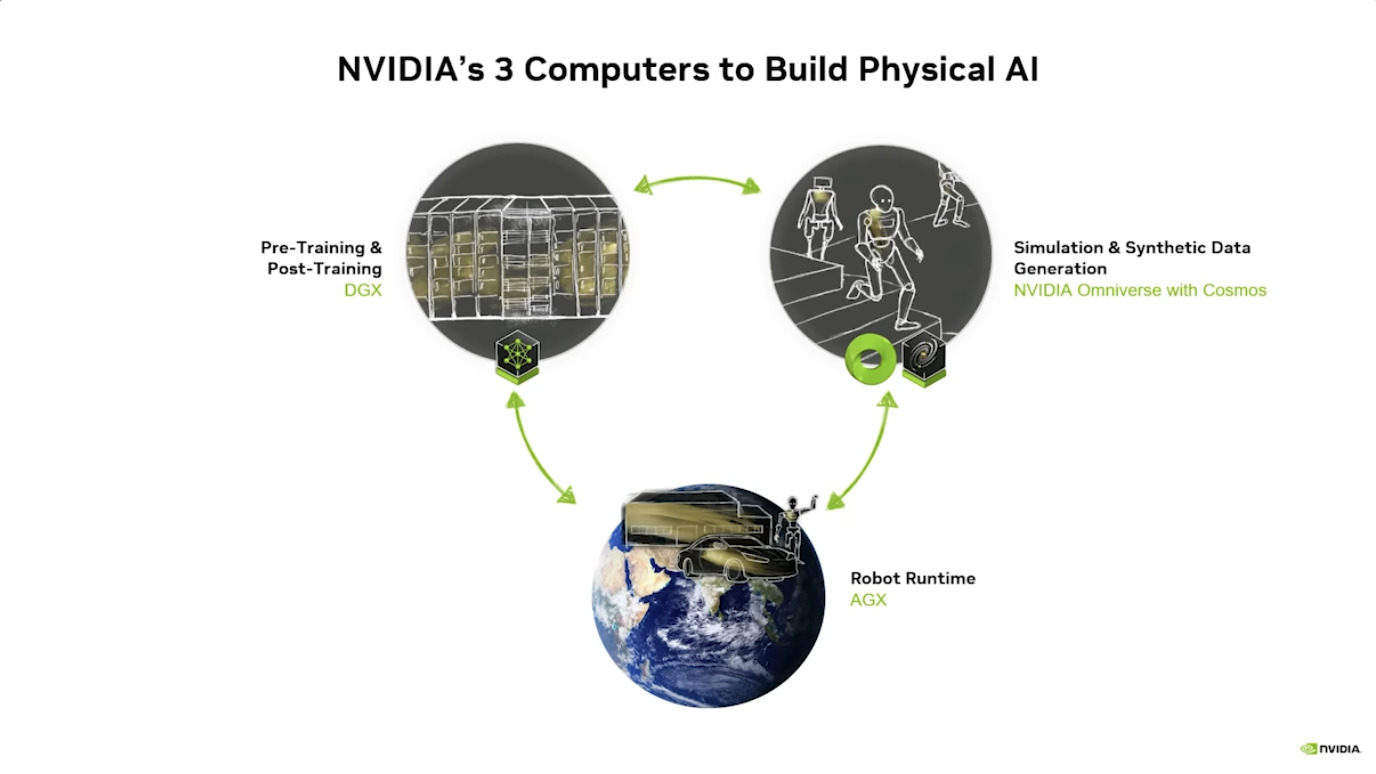
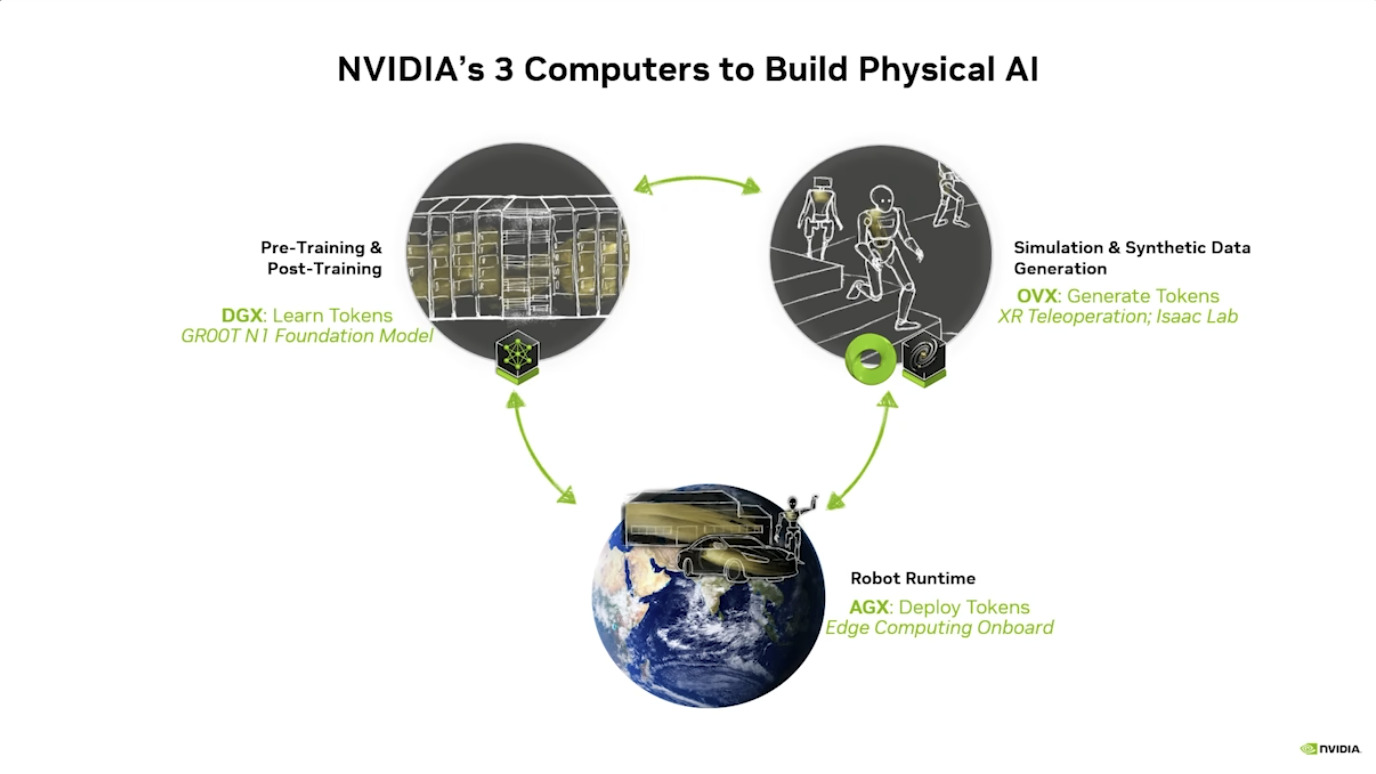
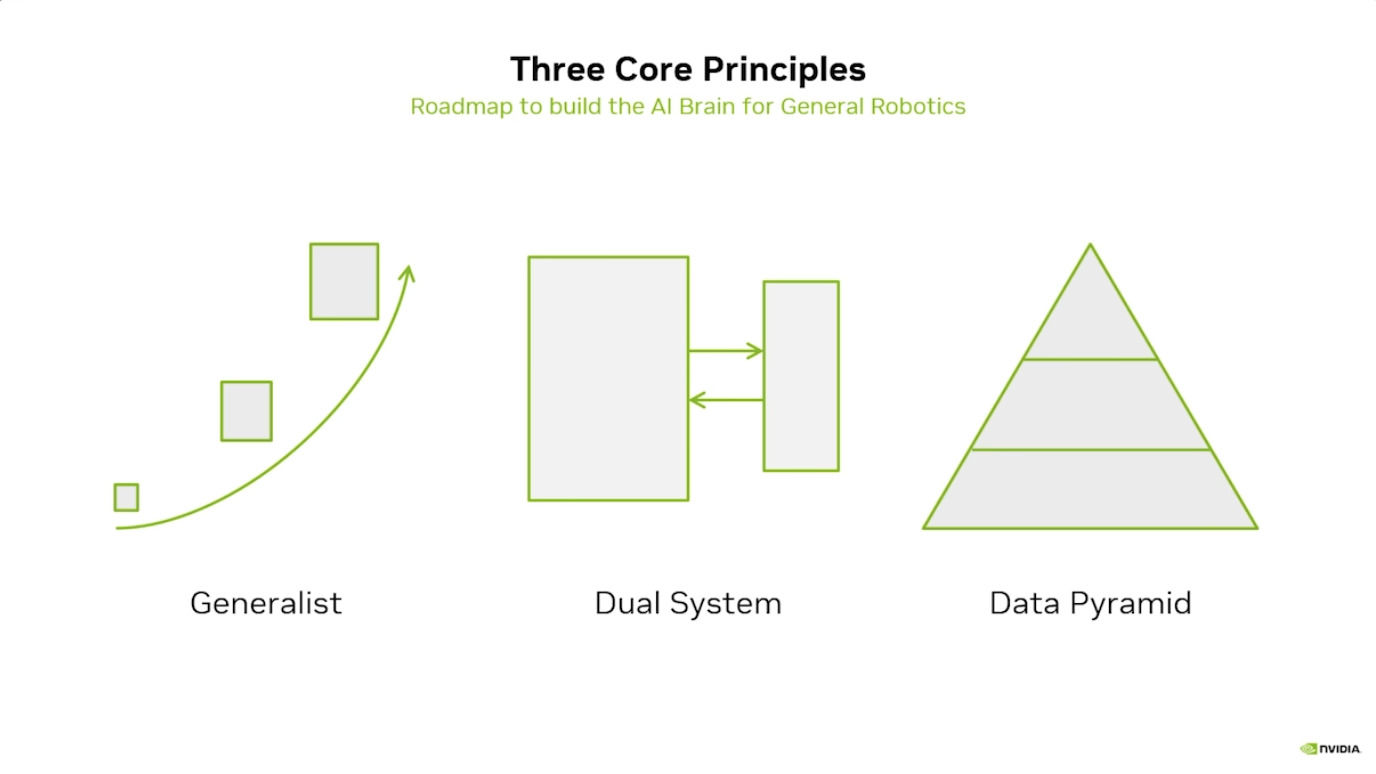
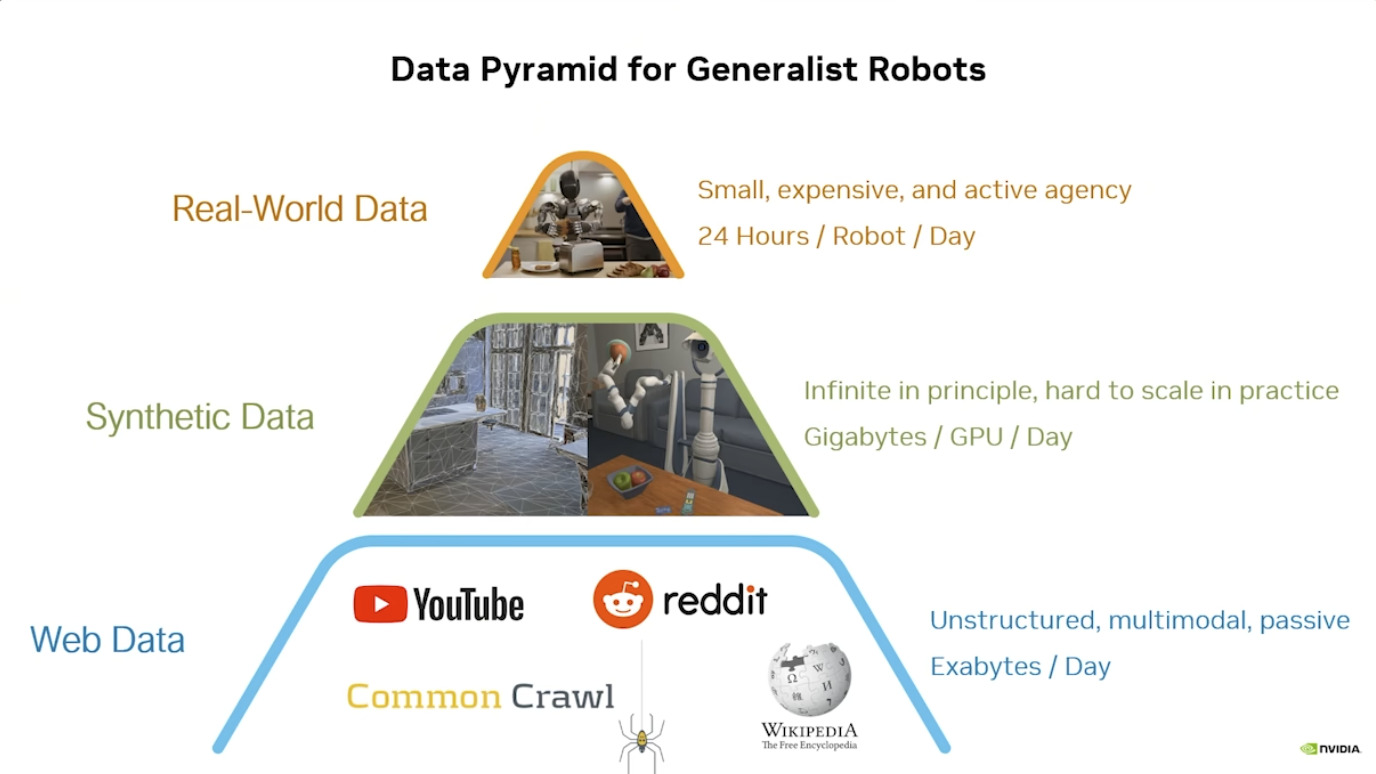
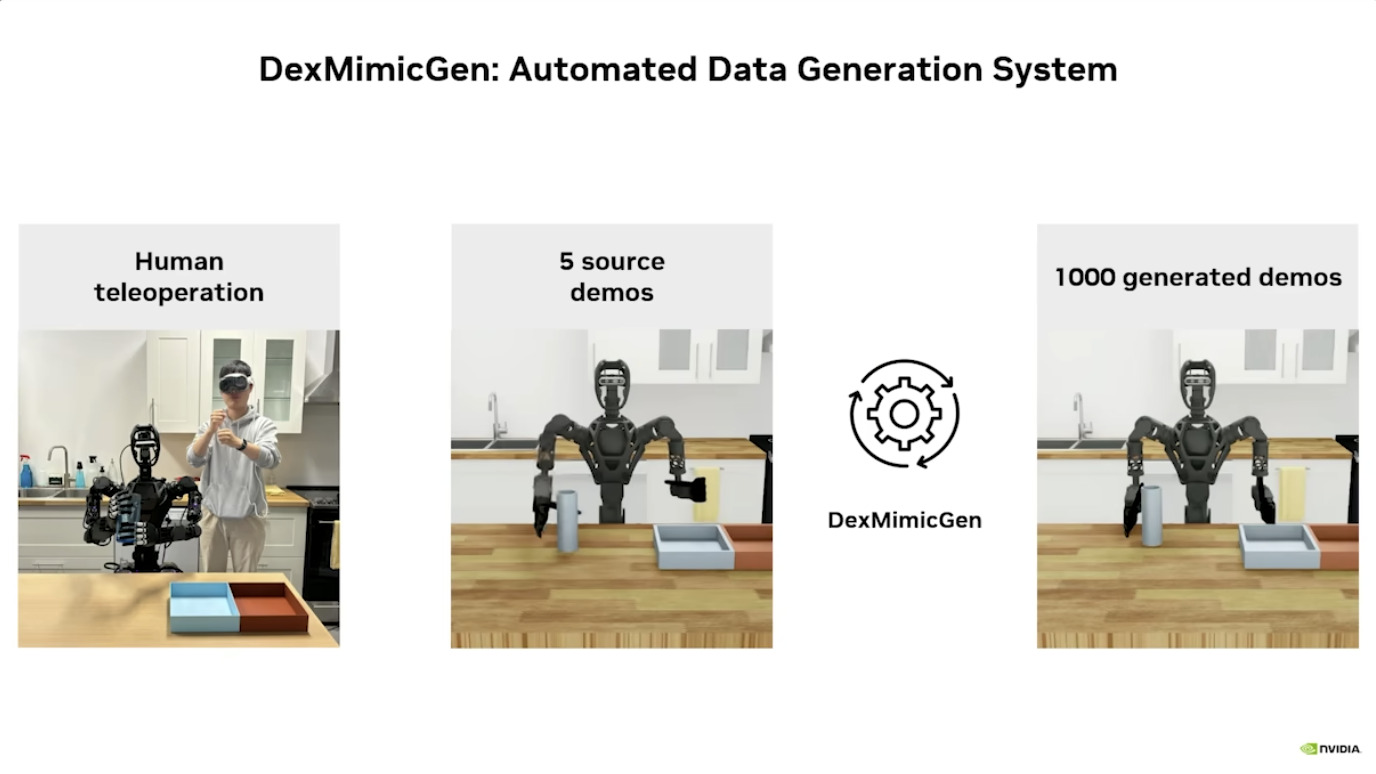
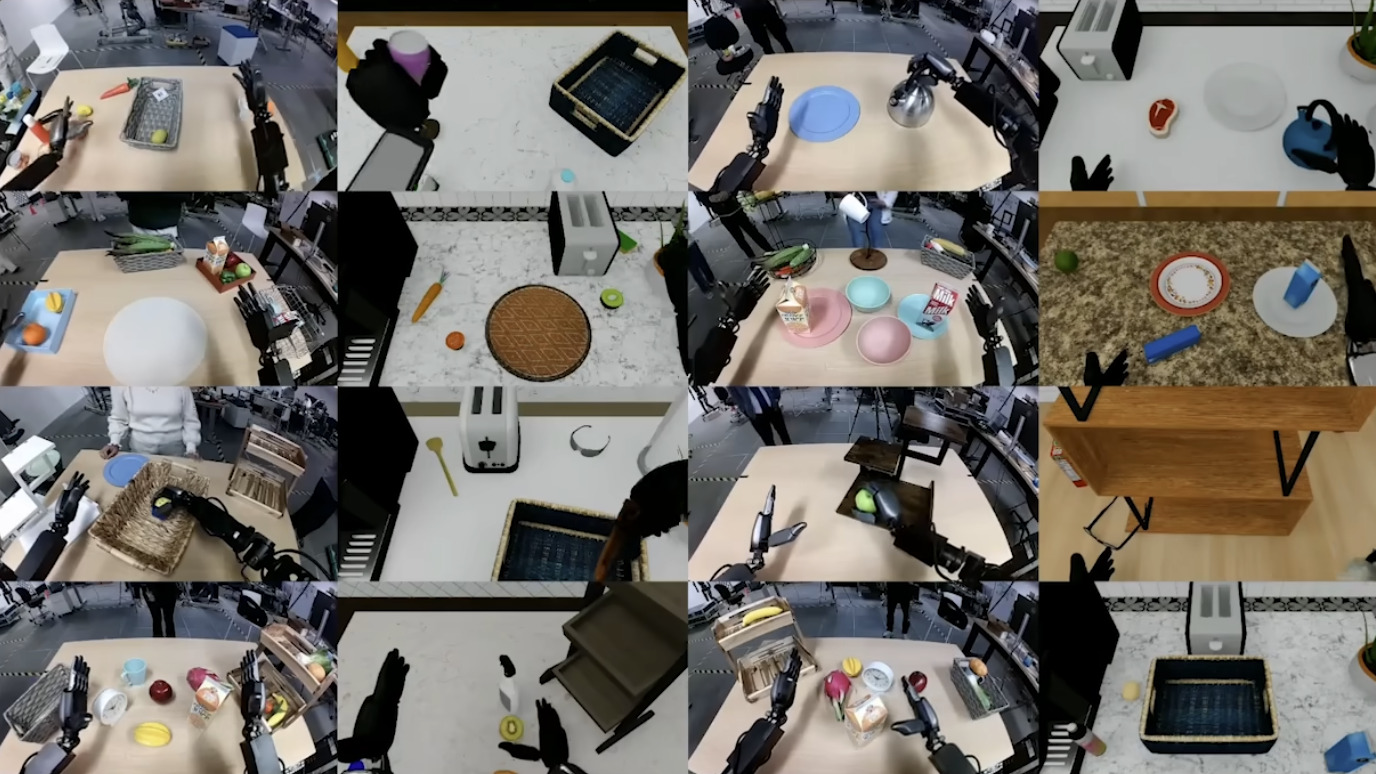
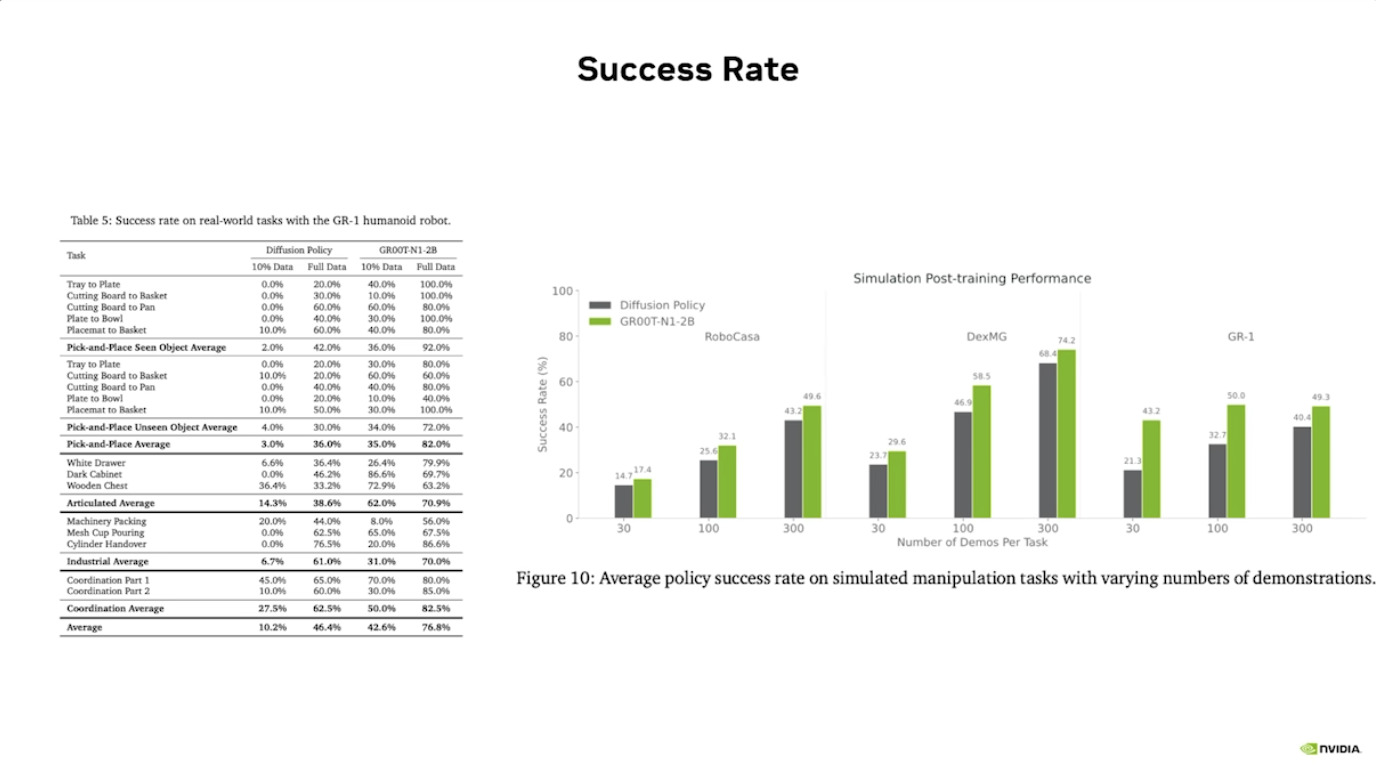
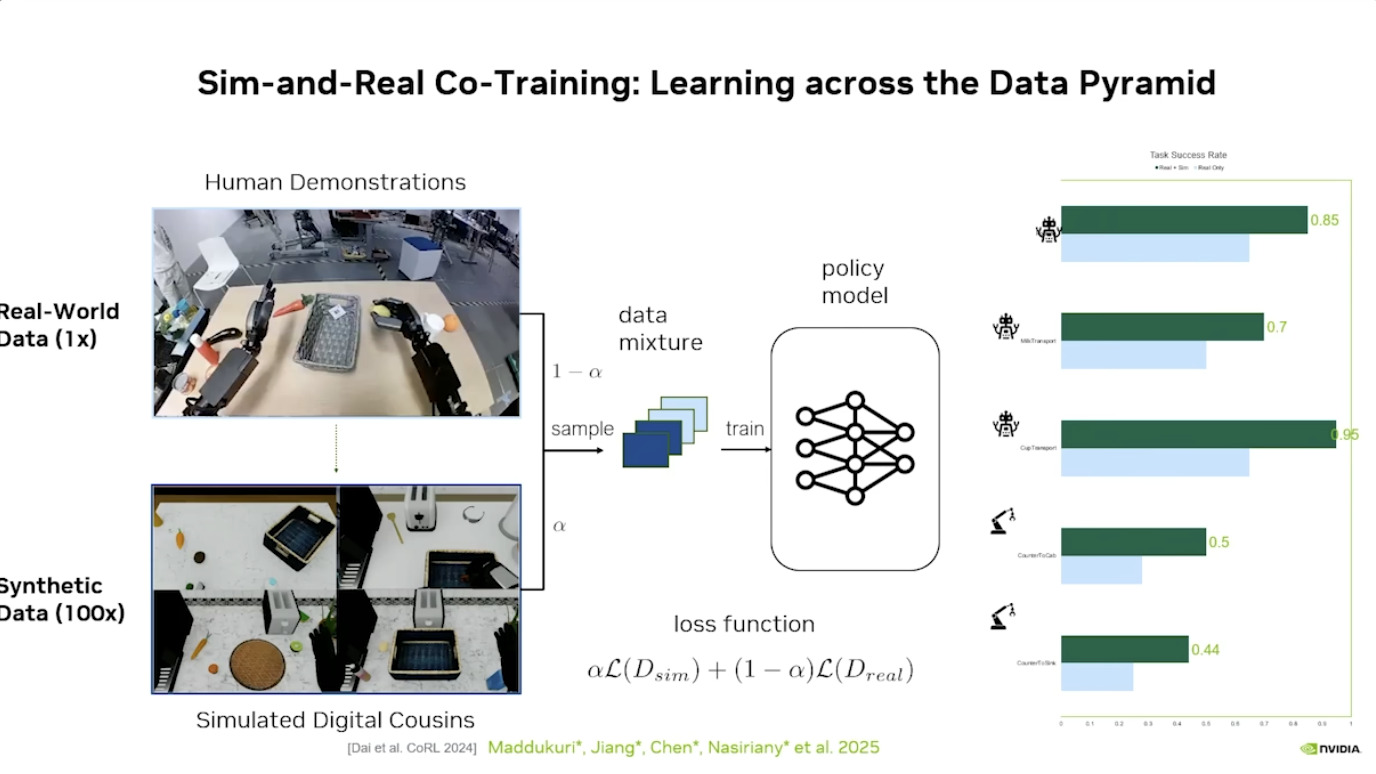
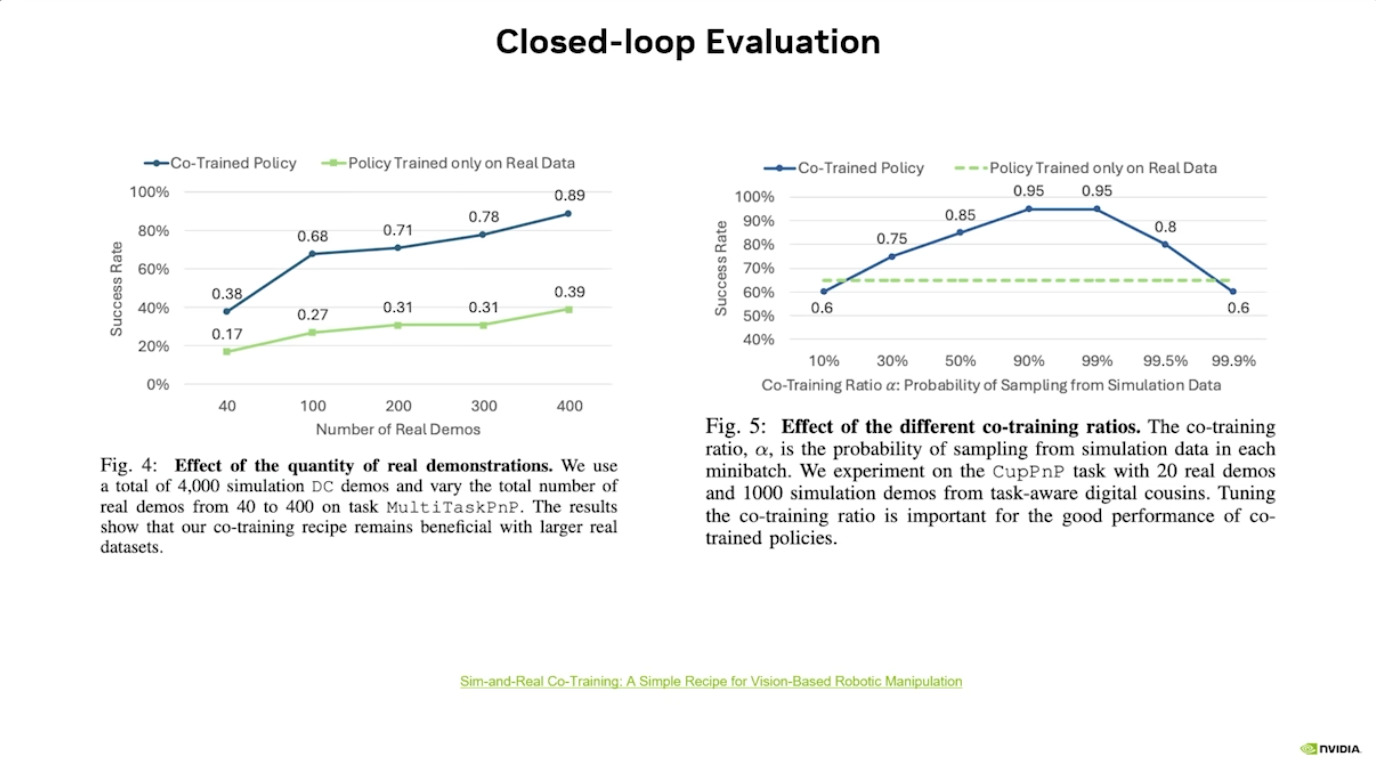
本文档概述了 NVIDIA Isaac GROOT N1,一个专为具身人工智能(Physical AI)设计的人形机器人基础模型。该系统通过三个核心原则运作:泛化能力、双系统架构(结合高层认知与低层控制),以及一个涵盖现实世界数据、合成数据和网络数据的数据金字塔。 Isaac GROOT N1 利用大量训练数据来驱动人形机器人进行通用型操作,并通过 NVIDIA 的生态系统,包括 Omniverse 和 Isaac Lab 进行模拟与部署。推荐的的微调方法是:收集真实数据,也要生成对应比例的模拟数据。


Isaac GROOT Overview
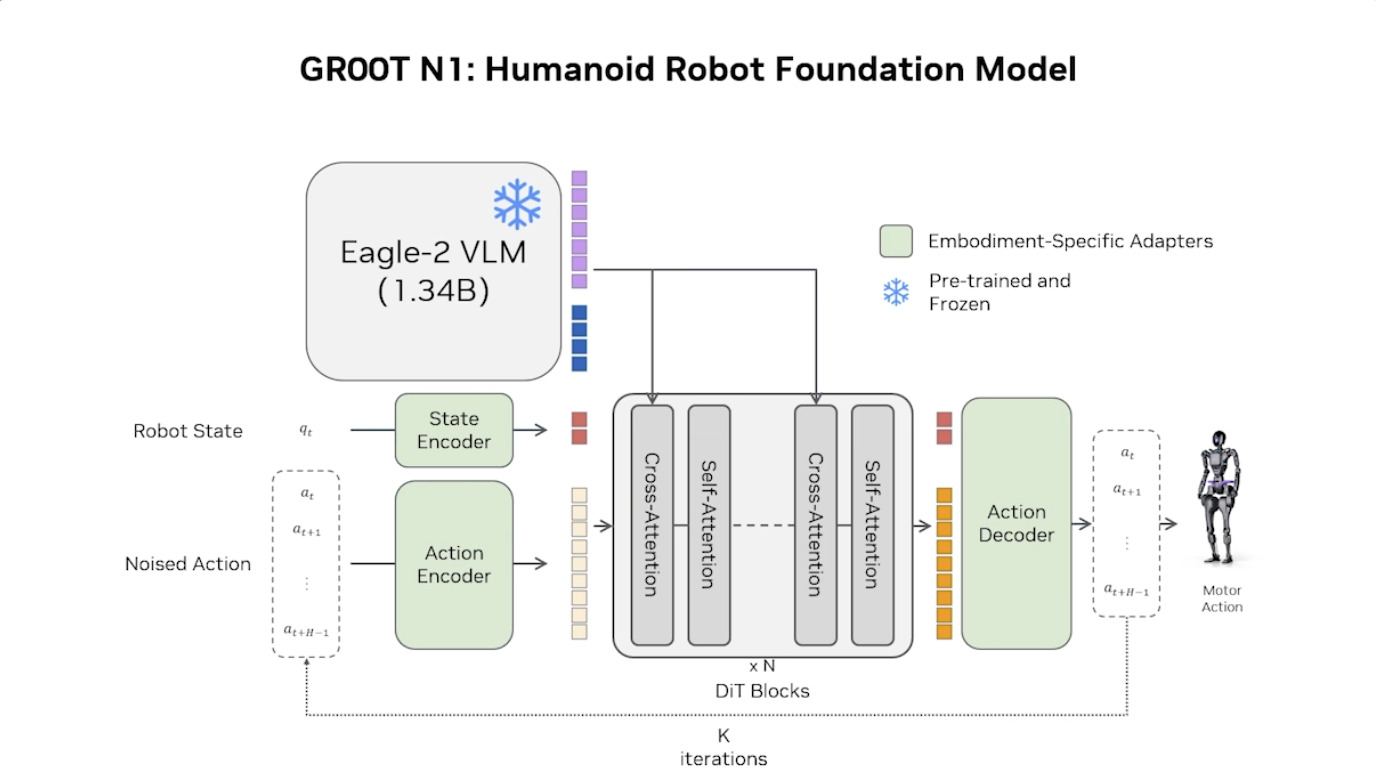
Isaac GROOT N1 - Architecture



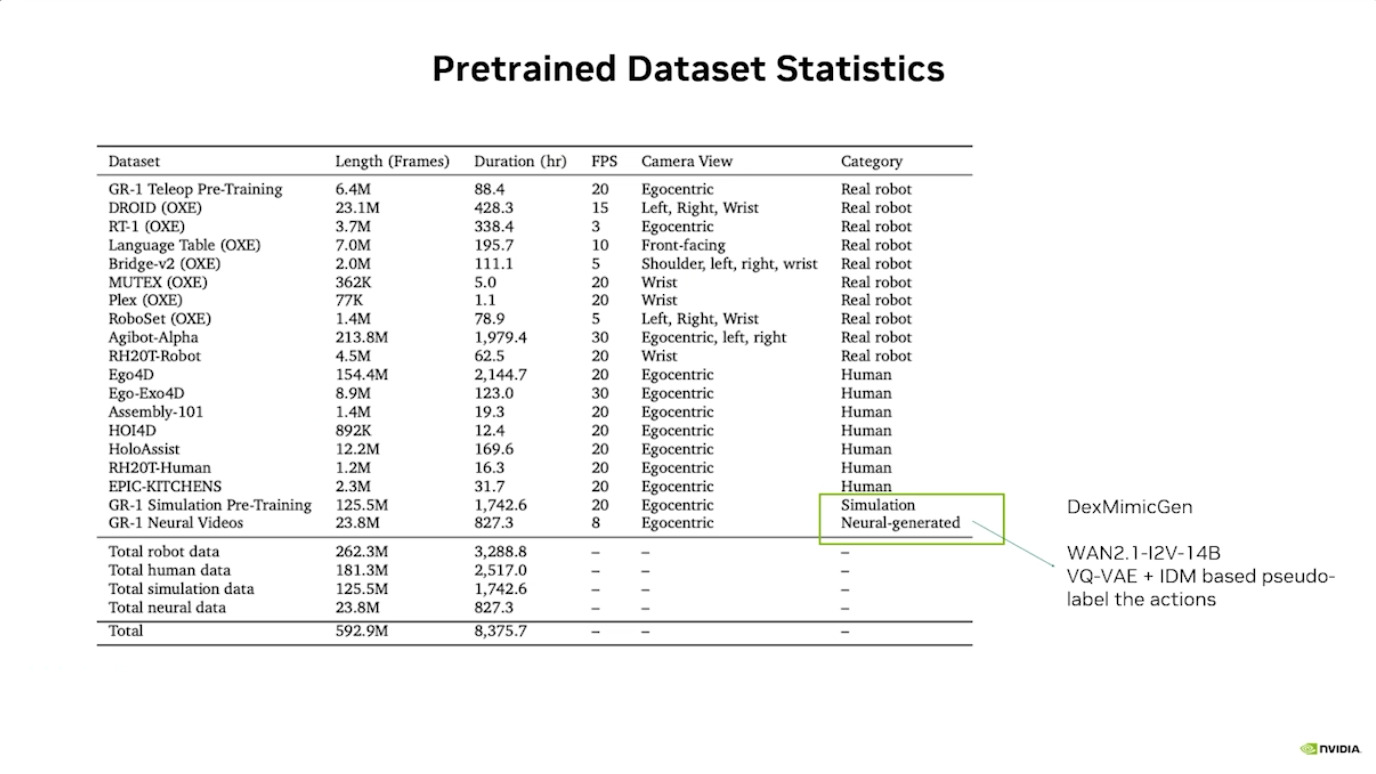
Isaac GROOT N1 - Data

Isaac GROOT N1 - Evaluation




Inference Benchmark
参考资料
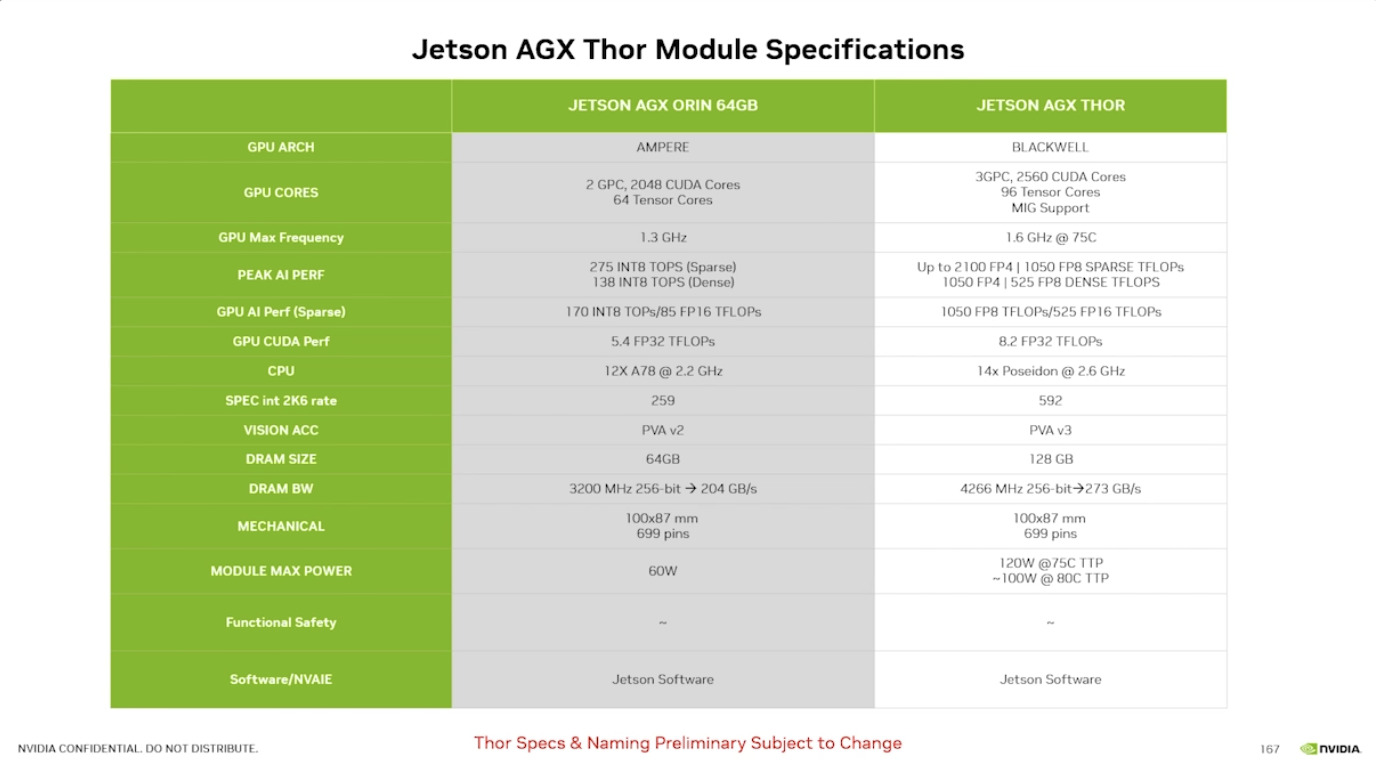
具身端侧芯片 NVIDlA Jetson Thor 和 NVIDIA Isaac ROS 介绍
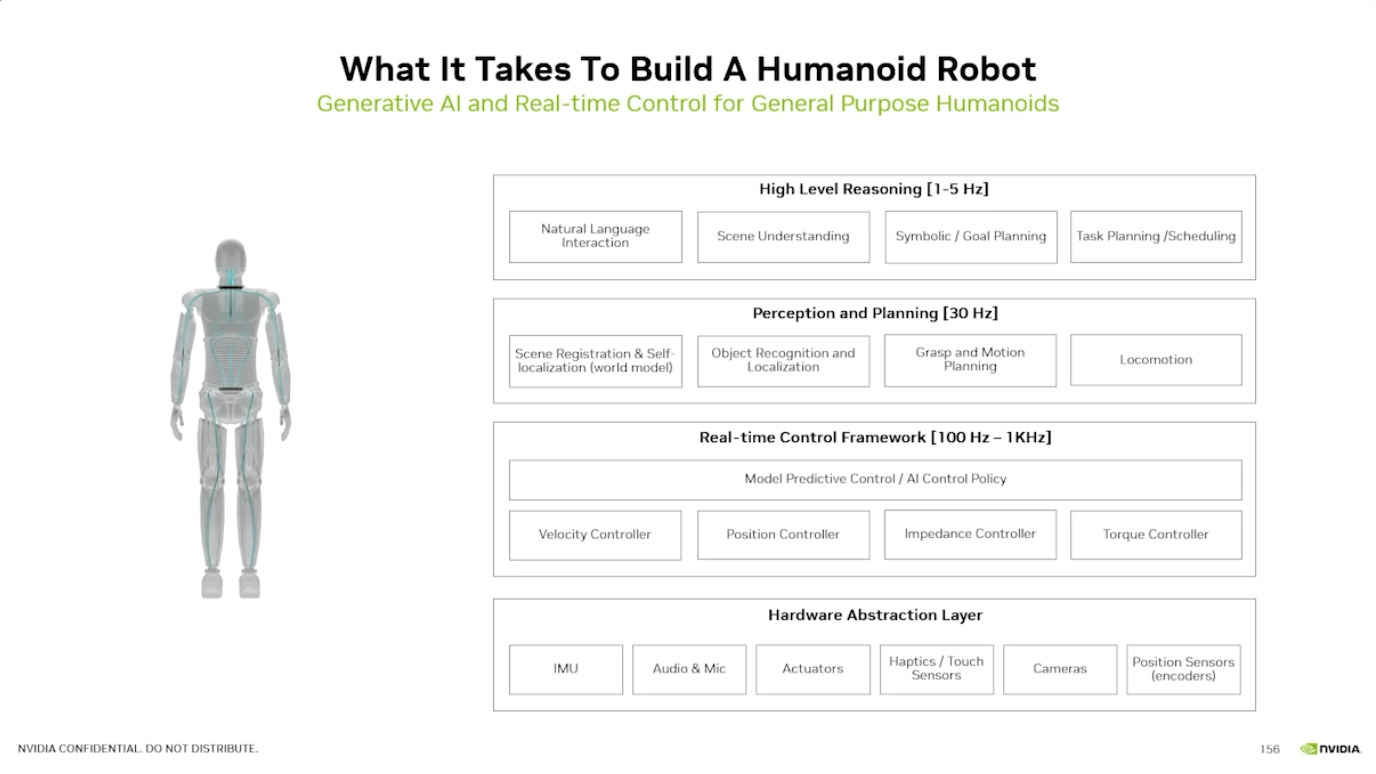
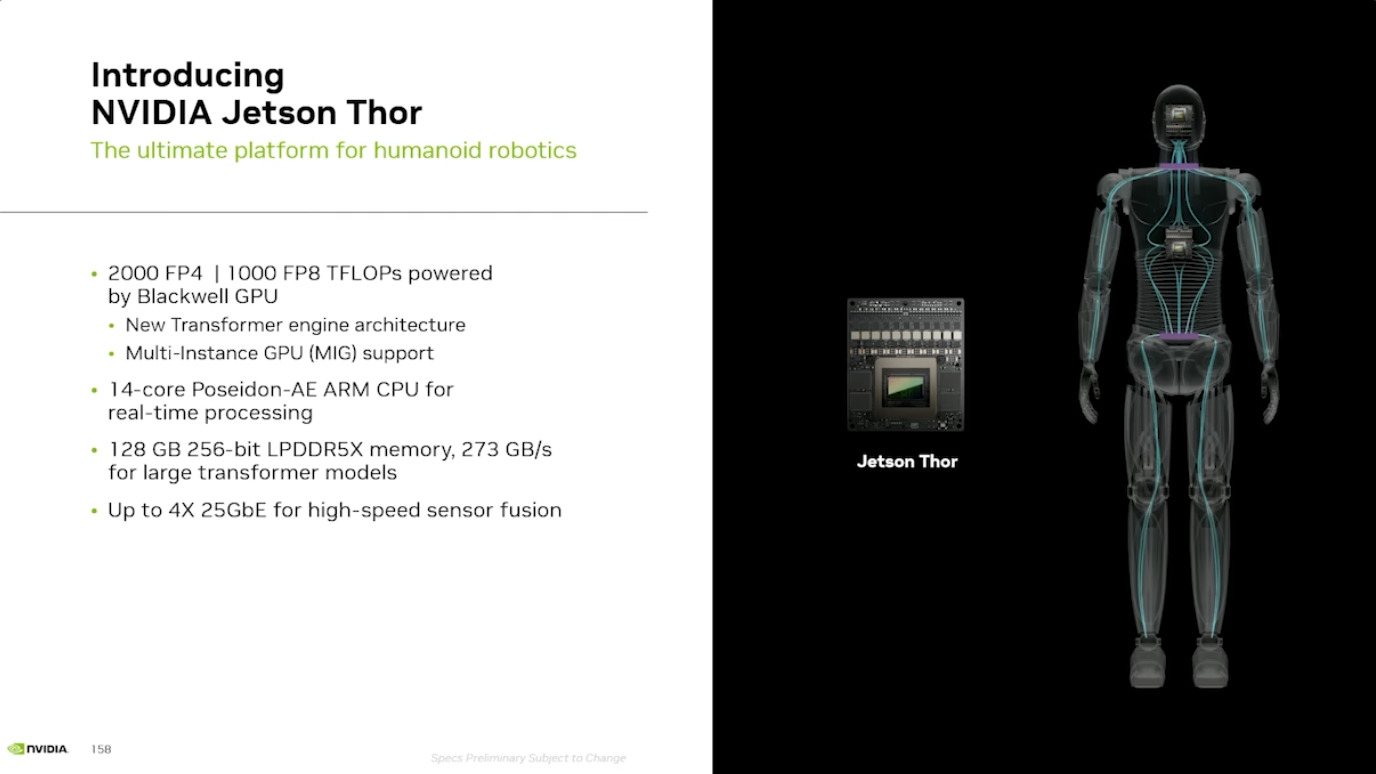
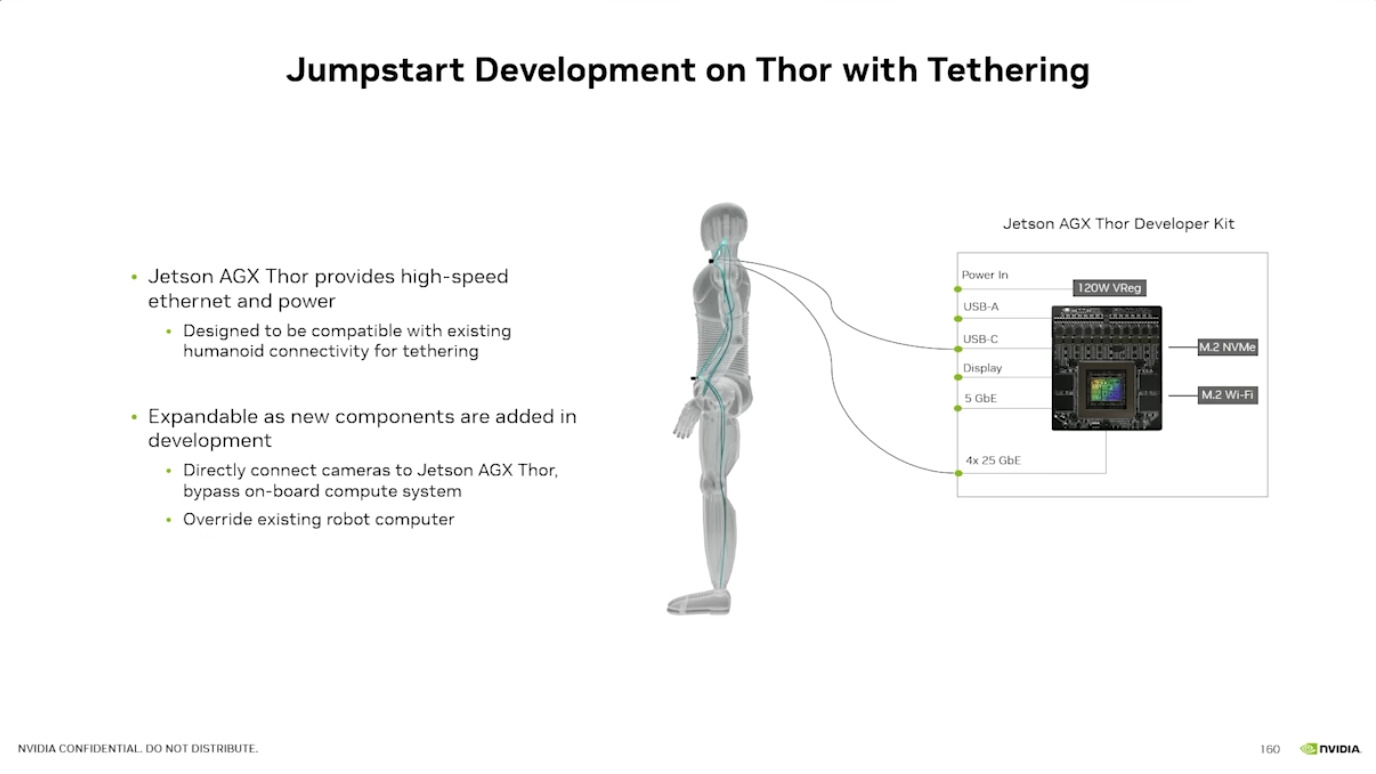
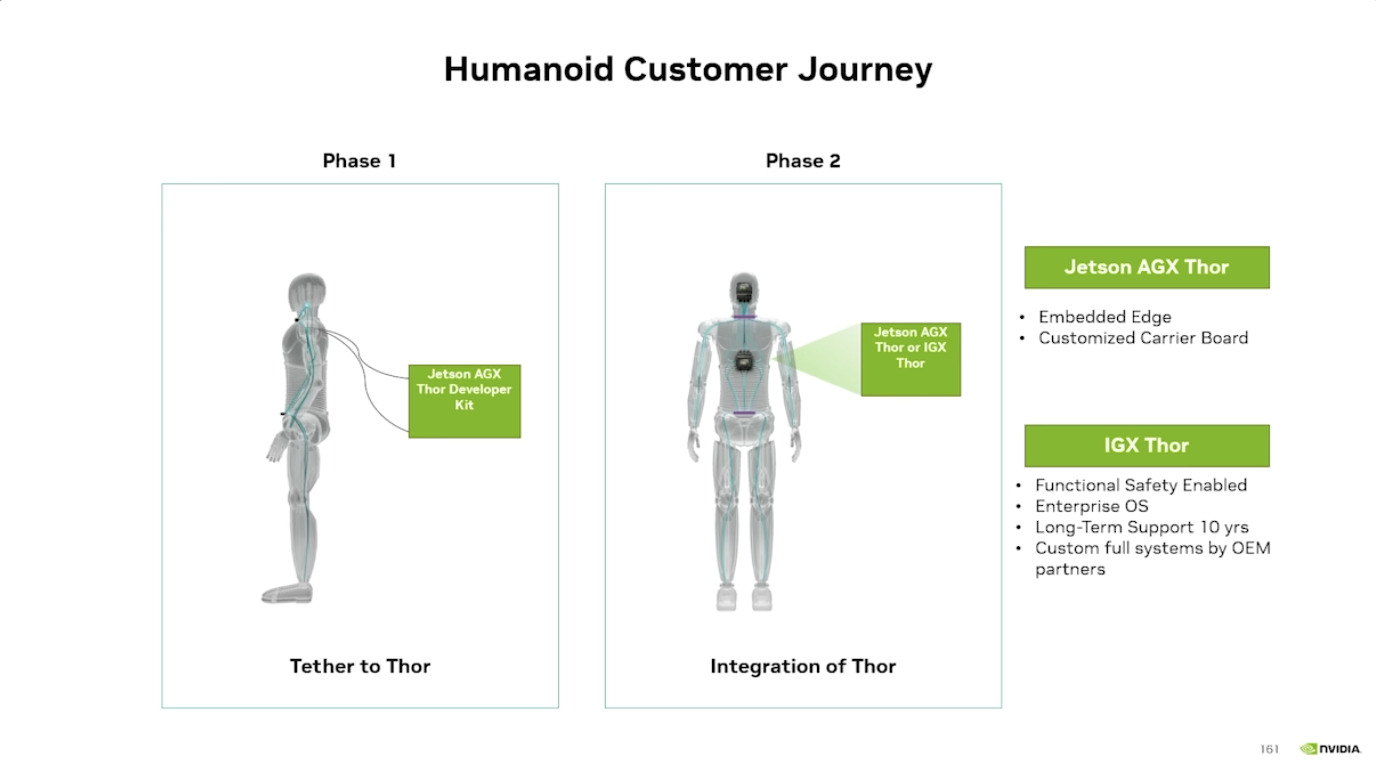
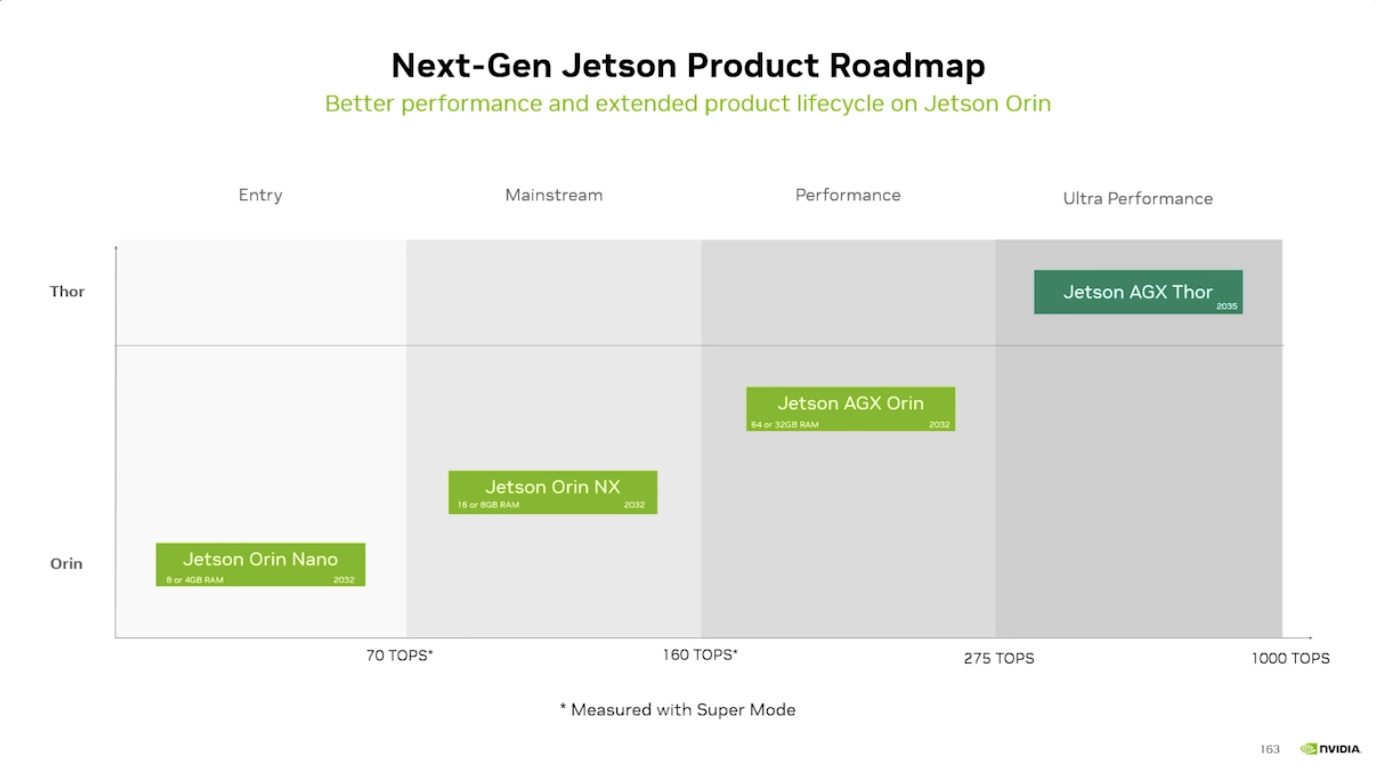
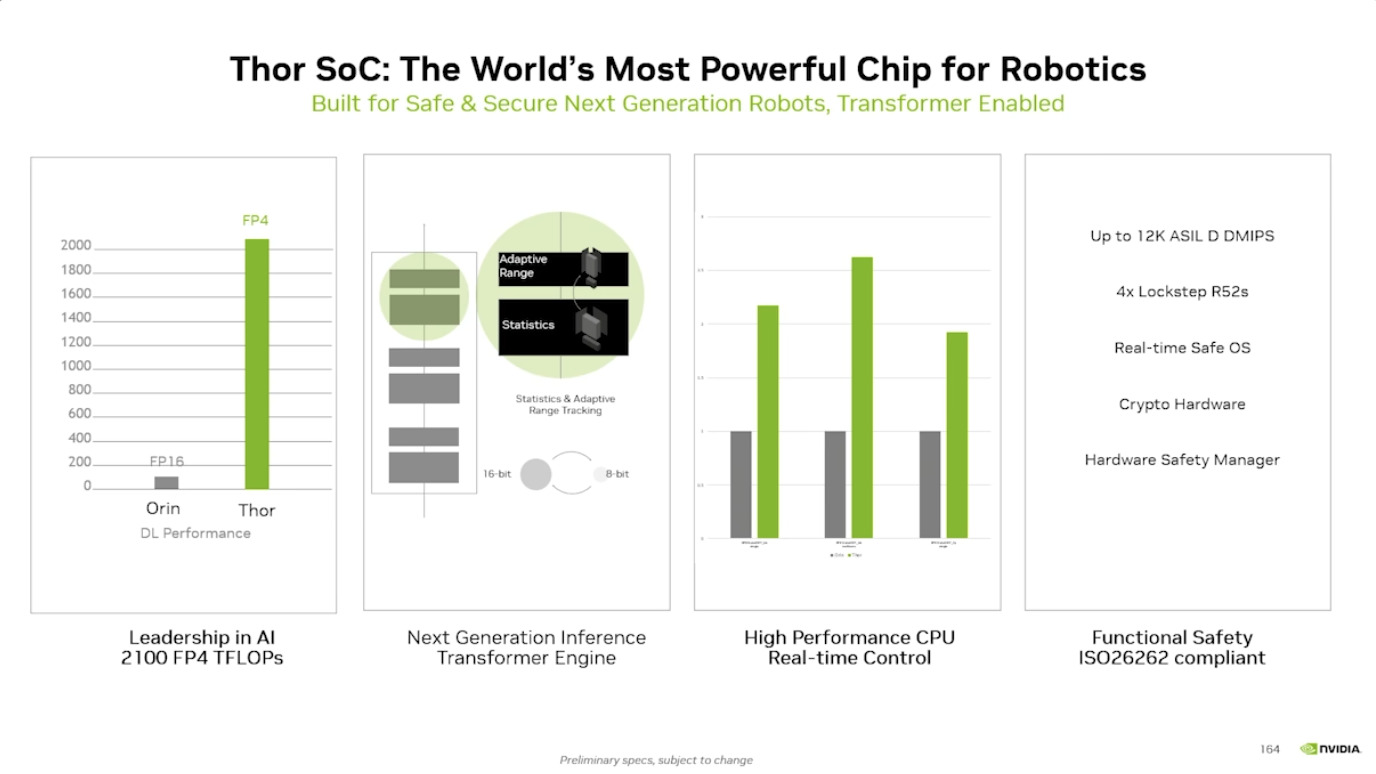
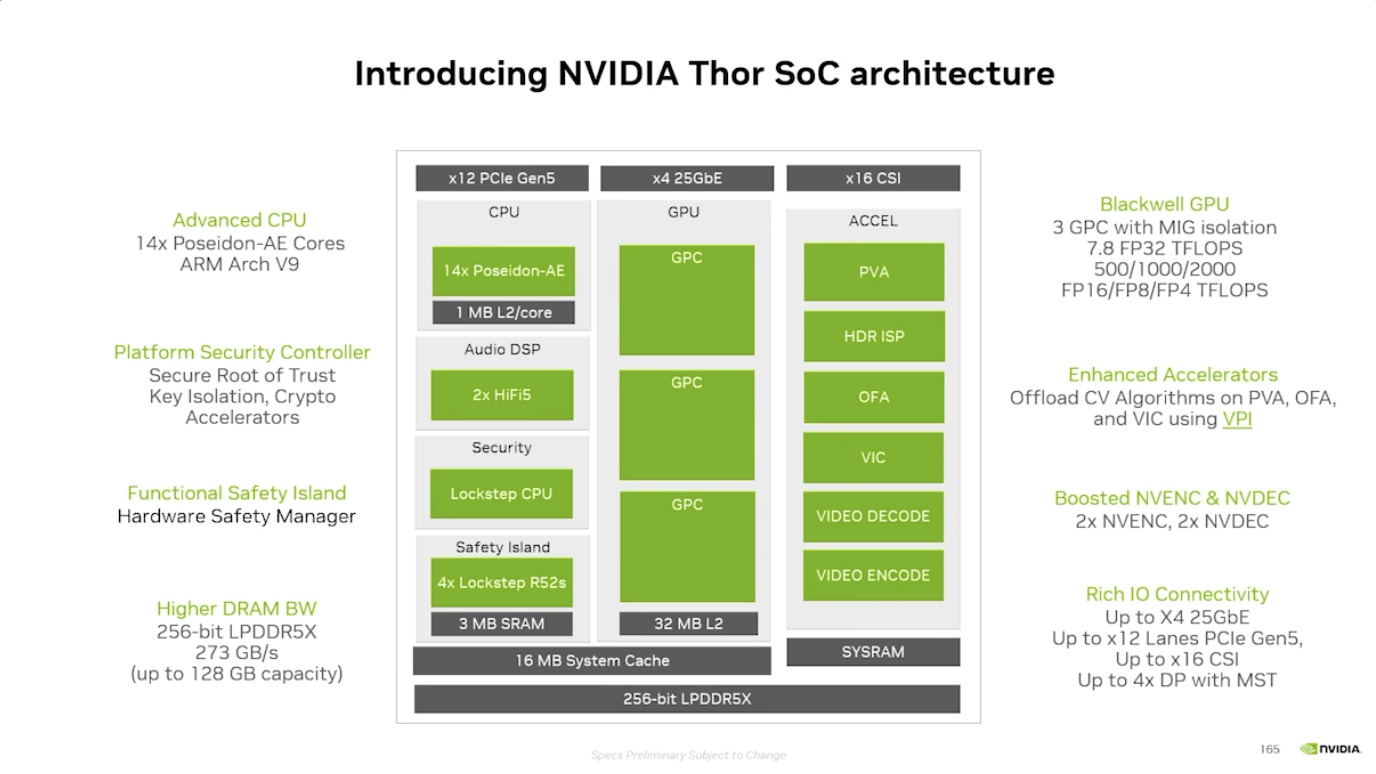
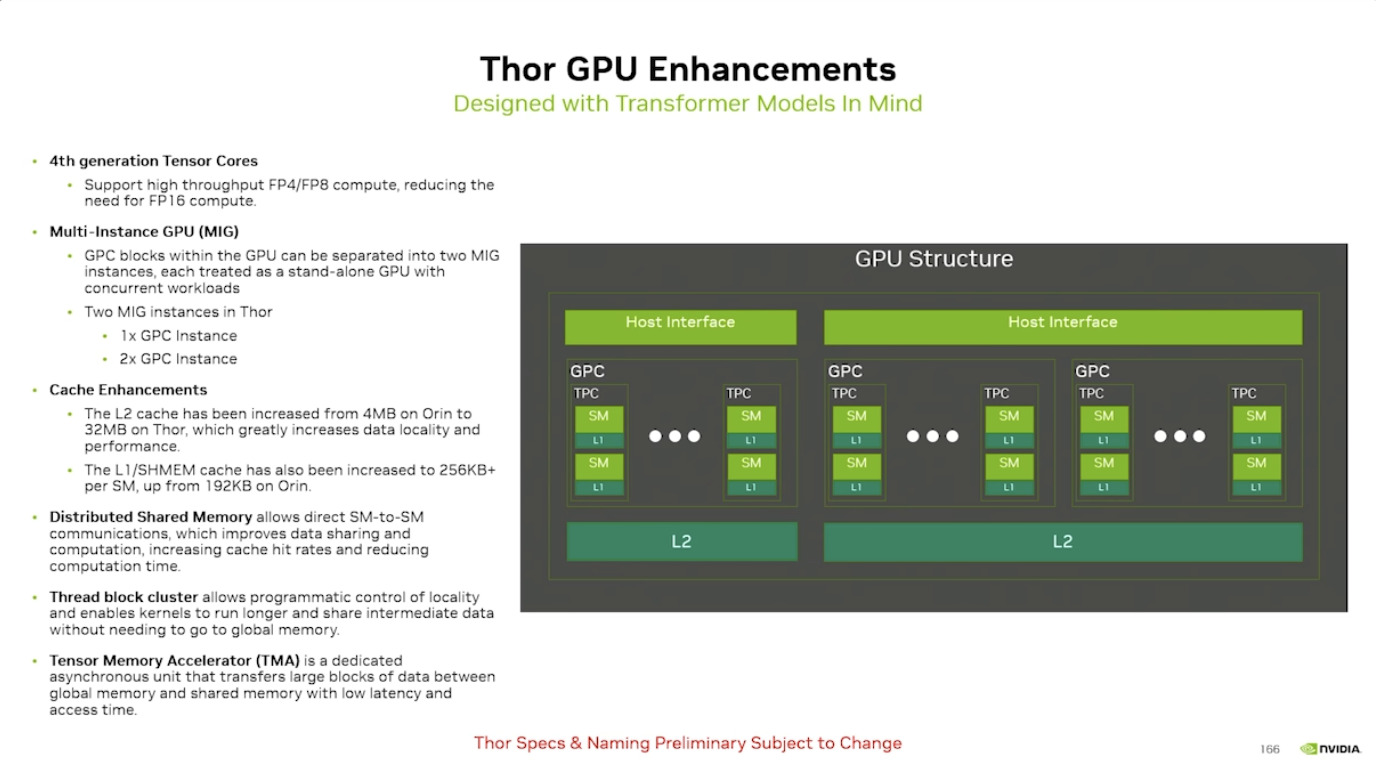
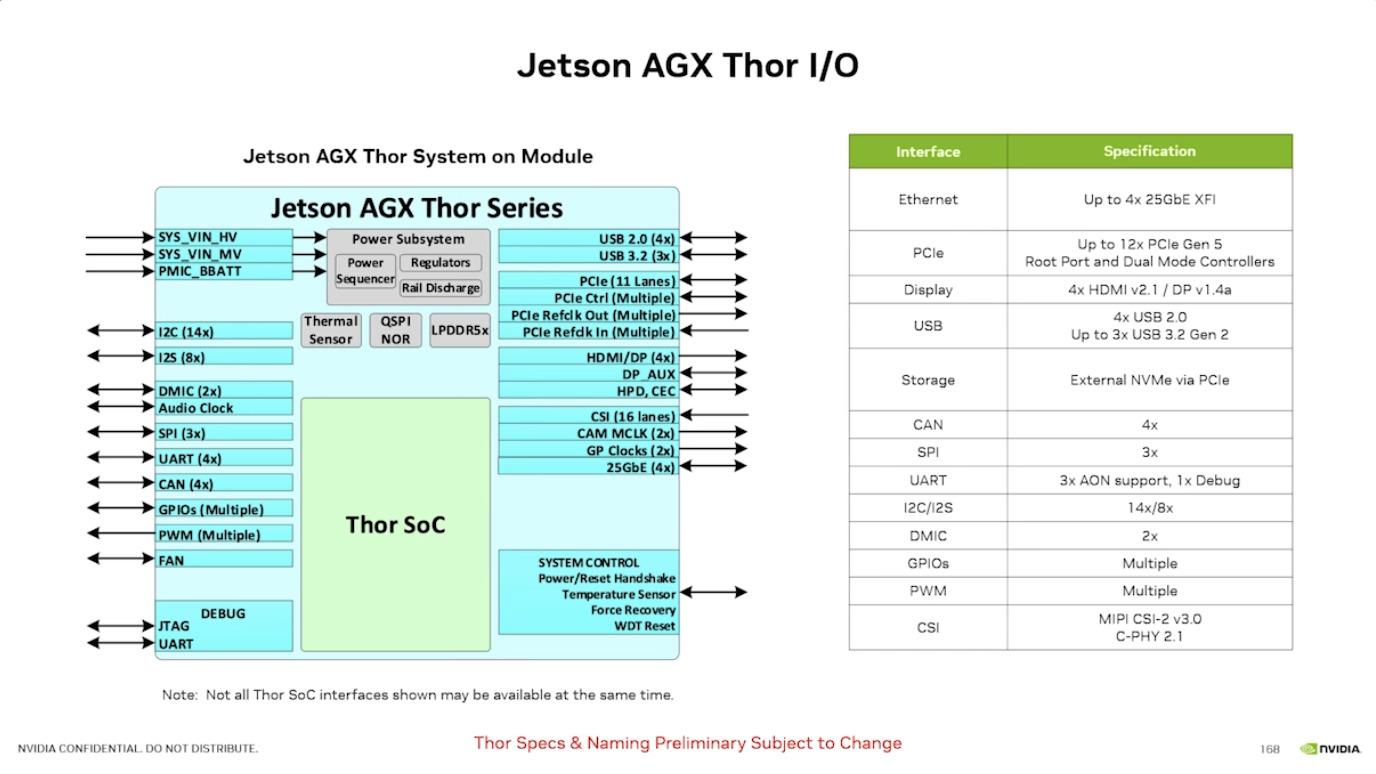
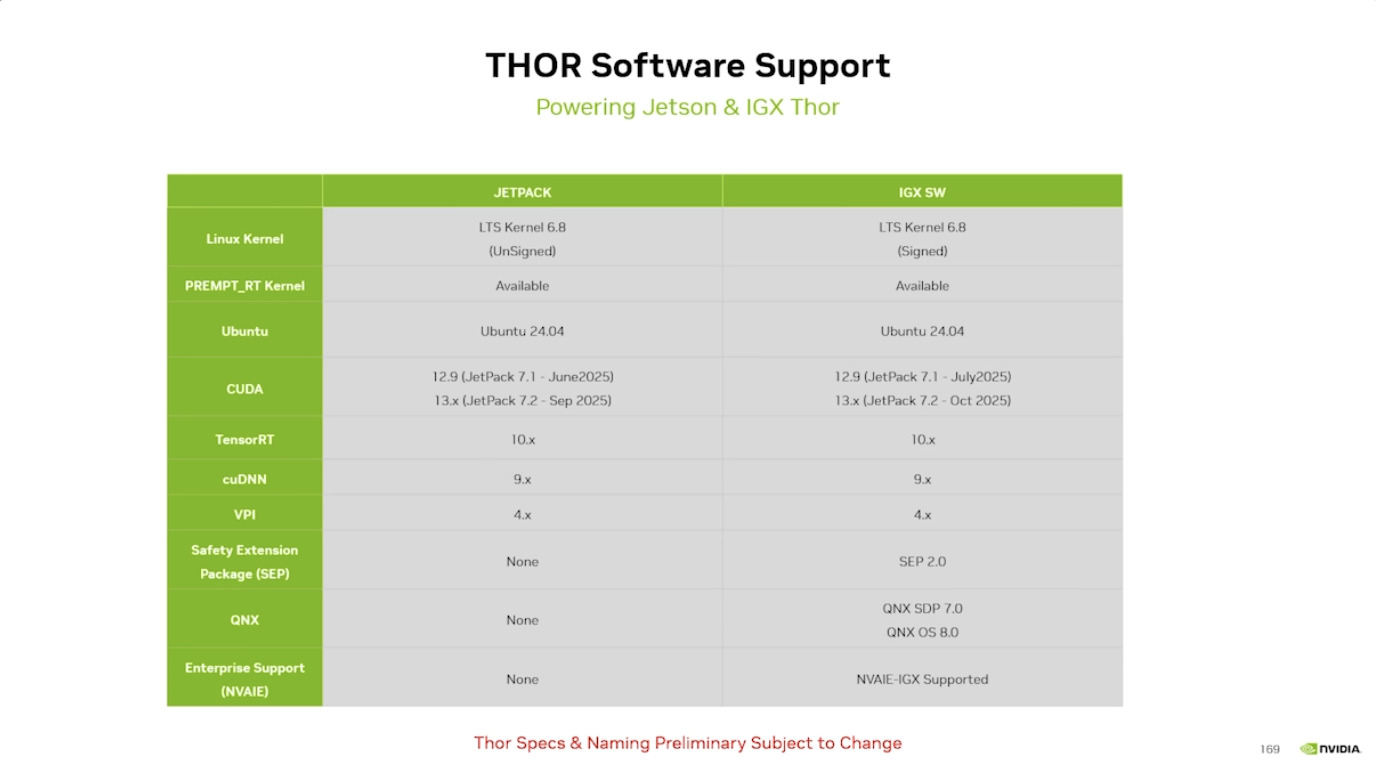
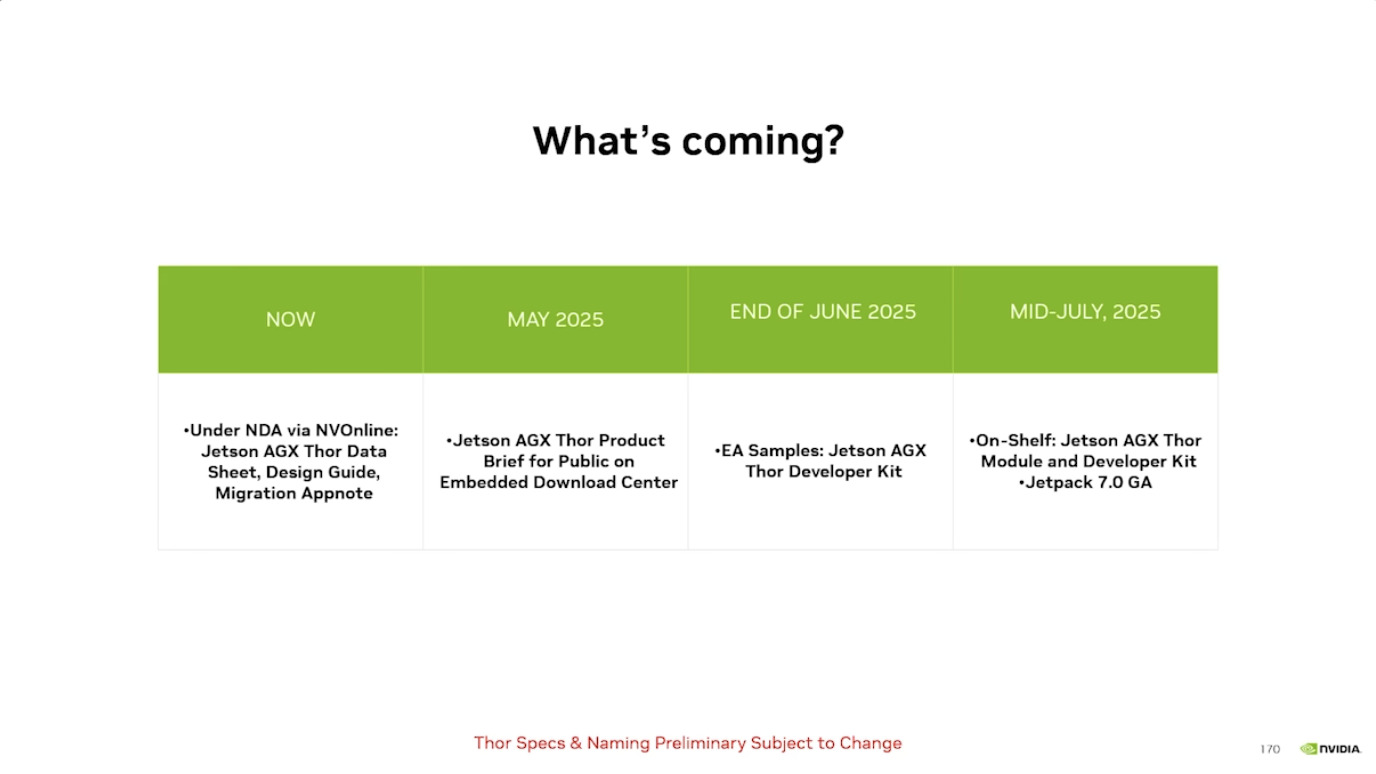
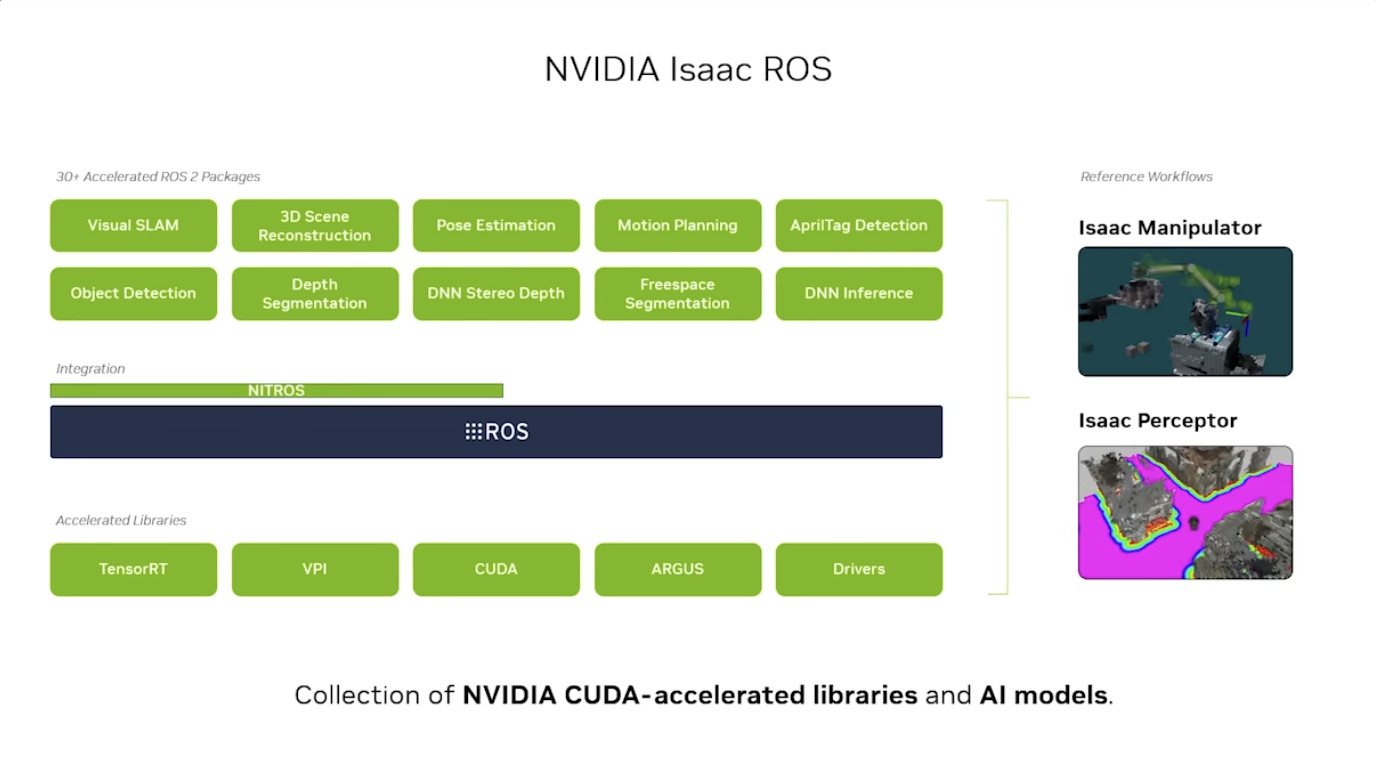
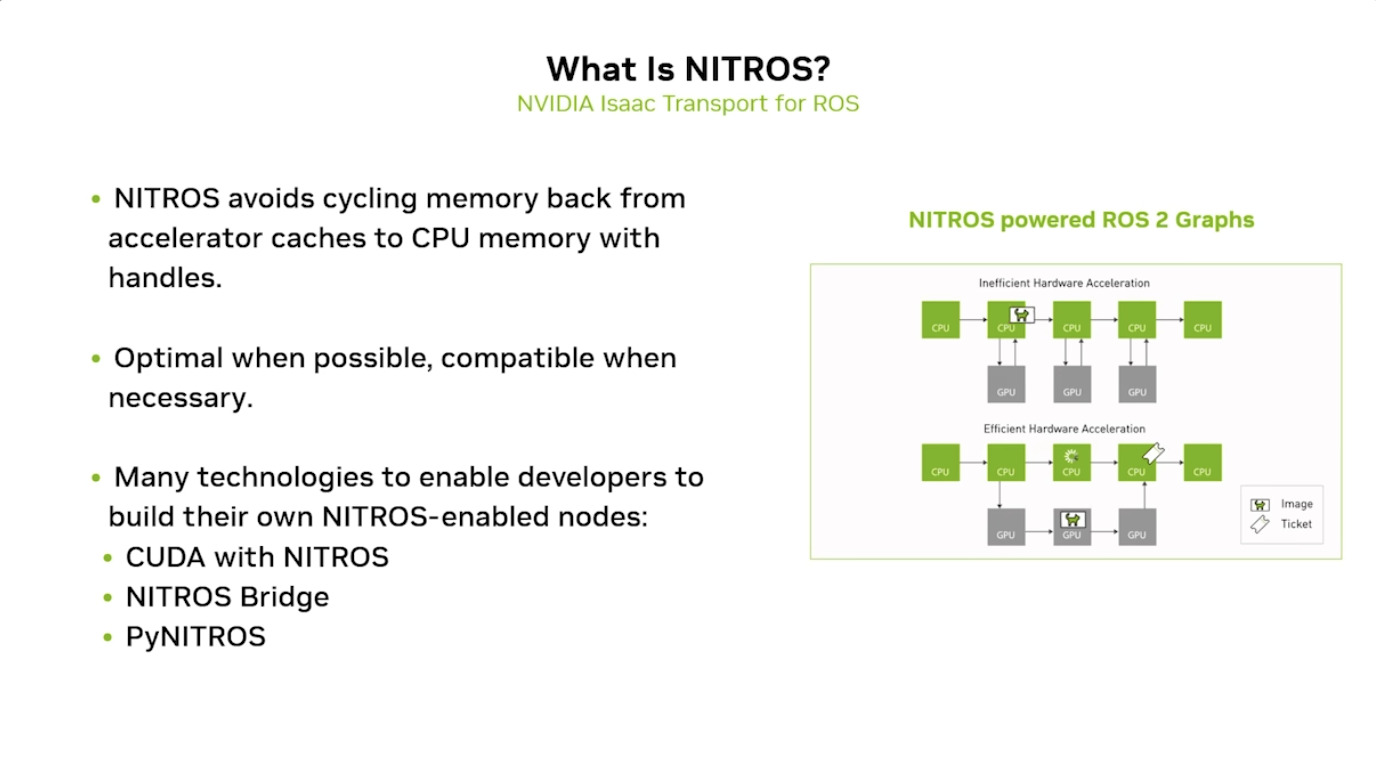
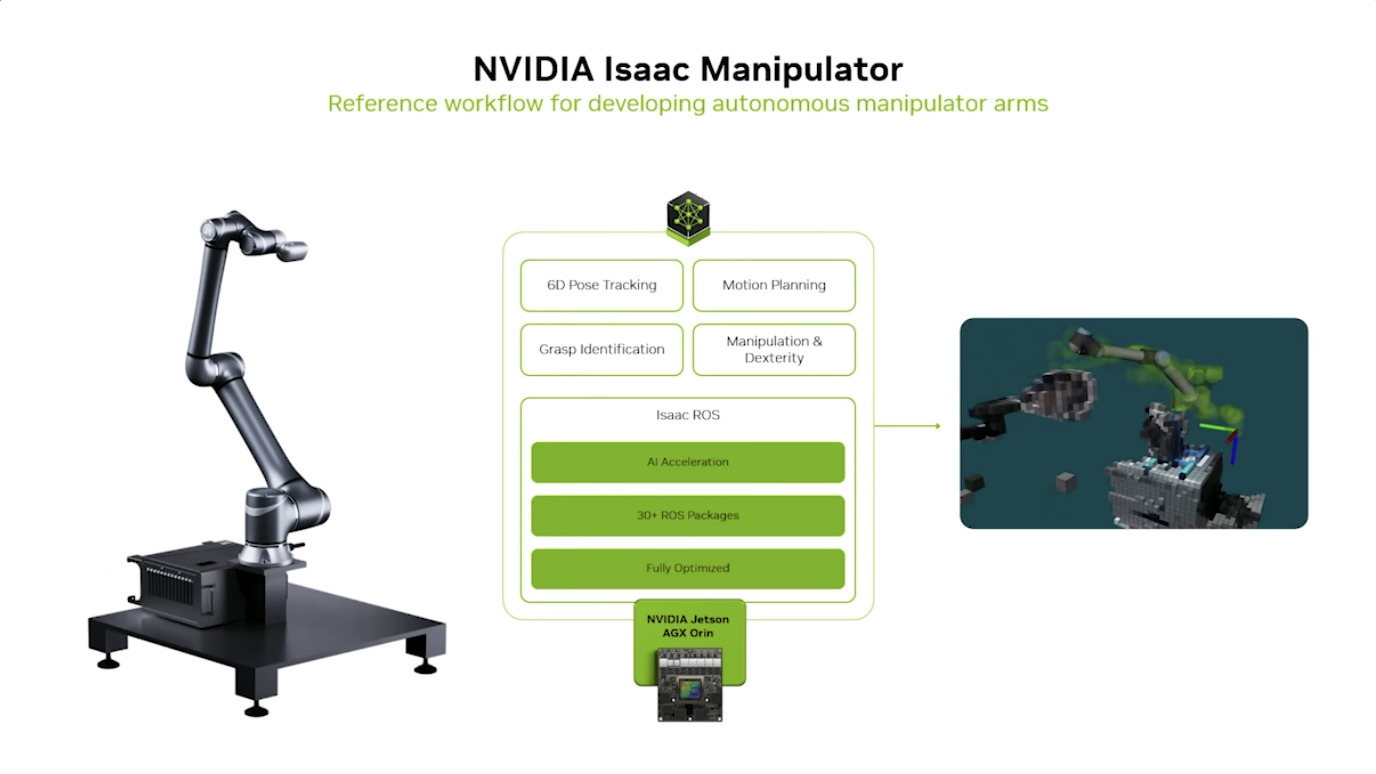
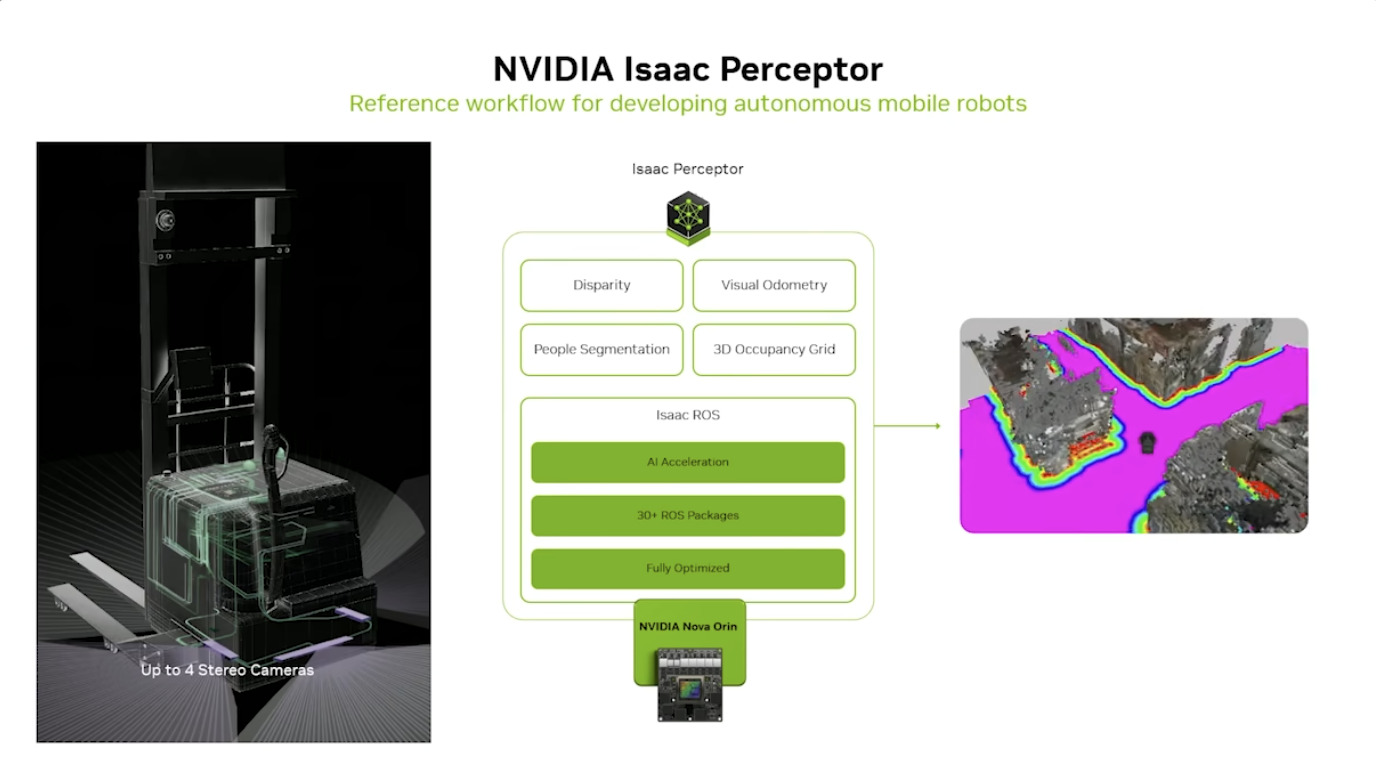
本文档详细介绍了NVIDIA Jetson Thor,这是一款为下一代人形机器人设计的强大计算平台,其特点包括卓越的AI性能、高速传感器处理、行业领先的安全性和强大的安全性。此外,文档还介绍了NVIDIA Isaac ROS,一个利用CUDA加速库和AI模型加速机器人开发的软件框架,并提及了NITROS以优化ROS 2的硬件加速。最后,还展示了Jetson AGX Thor开发套件和未来产品路线图,强调了该技术在复杂机器人应用中的应用,例如自主机械臂和移动机器人。
Physical Al & Robotics


AGX Thor Product Overview

Isaac ROS for Robot Development

参考资料