Reachy Mini 机器人
Reachy Mini
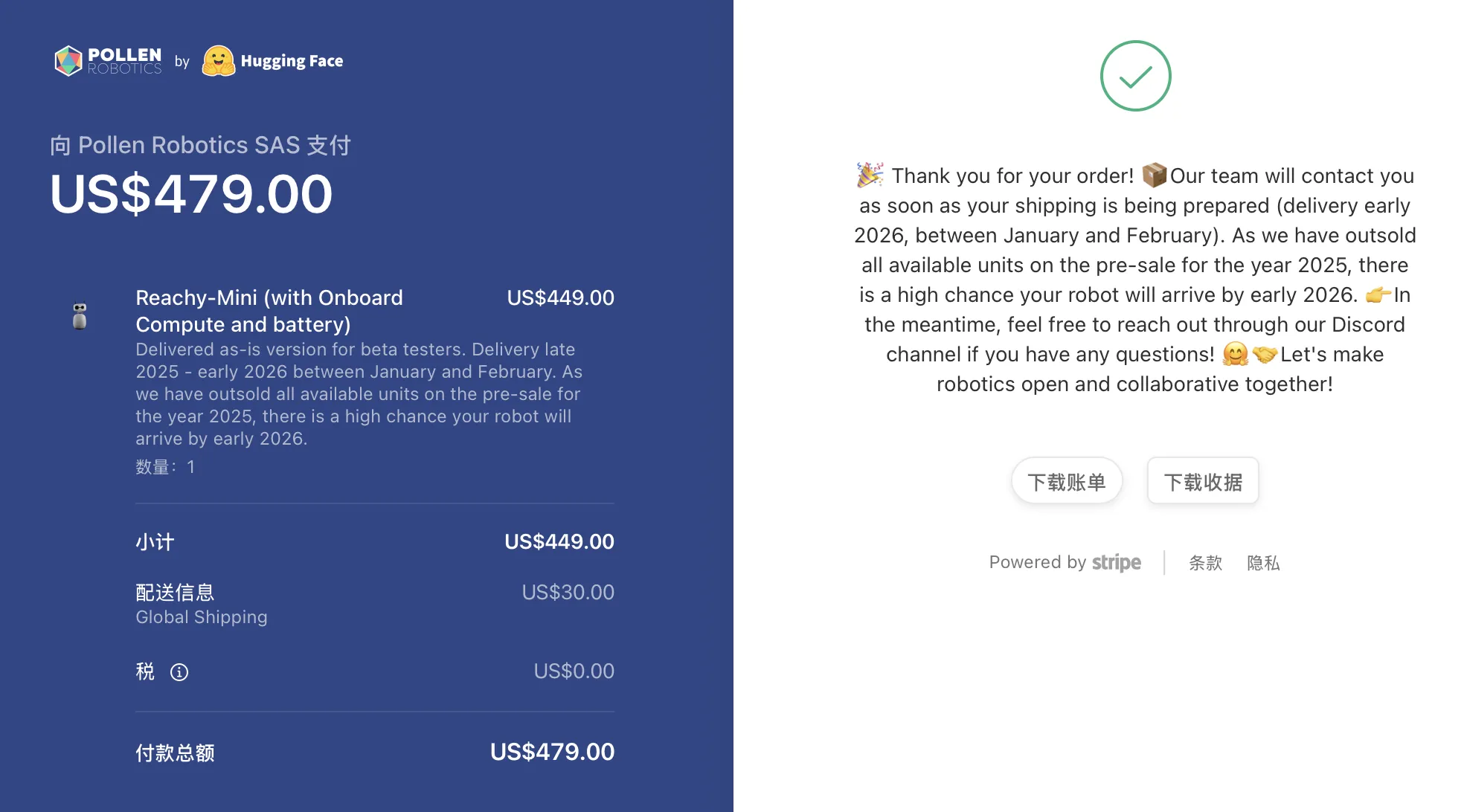
2025年12月买的 Reachy Mini 机器人,近5个月终于到手了。
介绍
Reachy Mini 是由法国机器人公司 Pollen Robotics 开发的一款开源的桌面级人形机器人,旨在为教育、研究和创意项目提供一个灵活且易于使用的平台。Reachy Mini 是 Reachy 机器人的小型版本,具有相似的功能和设计,但体积更小,更适合在桌面环境中使用。
硬件版本
| 功能特性 | Wireless (无线版) | Lite (轻量版) |
|---|---|---|
| 价格 | 299 | |
| 电机与机械结构 | 9 个伺服电机 | 9 个伺服电机 |
| 头部运动 | 6 自由度 (pitch, roll, yaw, x, y, z) | 6 自由度 (pitch, roll, yaw, x, y, z) |
| 身体旋转 | ±160° | ±160° |
| 天线 | 2 个动力感应天线 | 2 个动力感应天线 |
| 摄像头 | 广角摄像头 | 广角摄像头 |
| 麦克风 | 4 麦克风阵列 | 4 麦克风阵列 |
| 扬声器 | 5W 扬声器 | 5W 扬声器 |
| 板载算力 | 树莓派 CM 4 (16GB 存储) | - |
| 加速计 | 内置 IMU | - |
| Wi-Fi 连接 | 支持 | - |
| 独立模式 | 支持 | 需通过 USB 连接控制 |
| 供电方式 | 电池供电 + 电源适配器 (7.3V / 5A) | 仅限电源适配器 (7.3V / 5A) |
开箱与初体验 Welcome to Reachy Mini!