盘古大模型关键技术解读
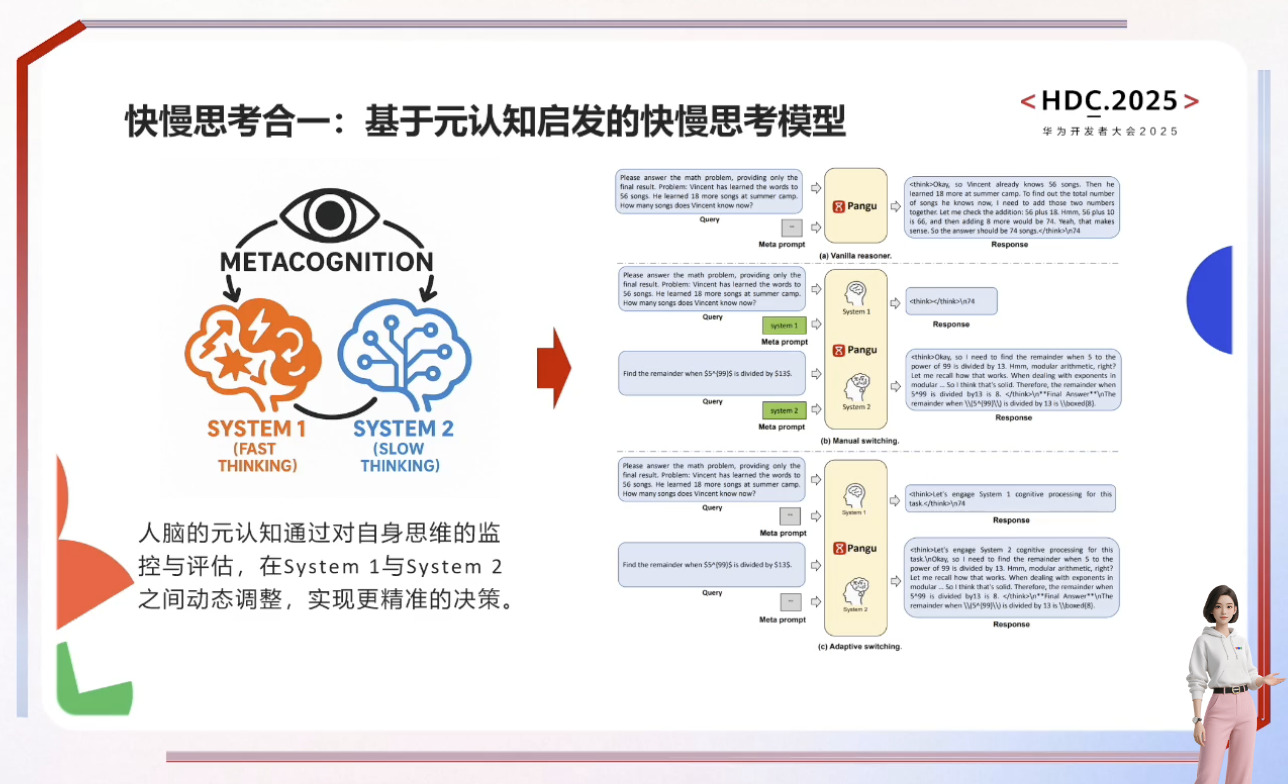
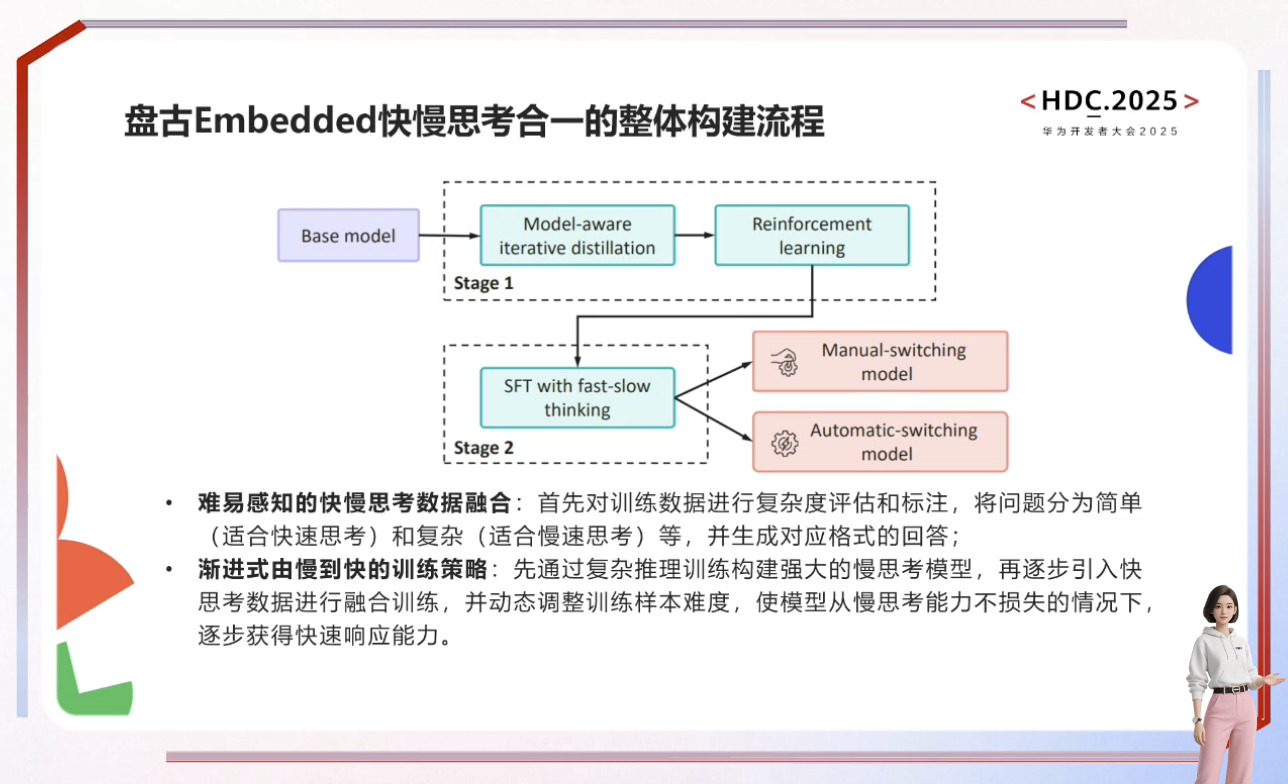
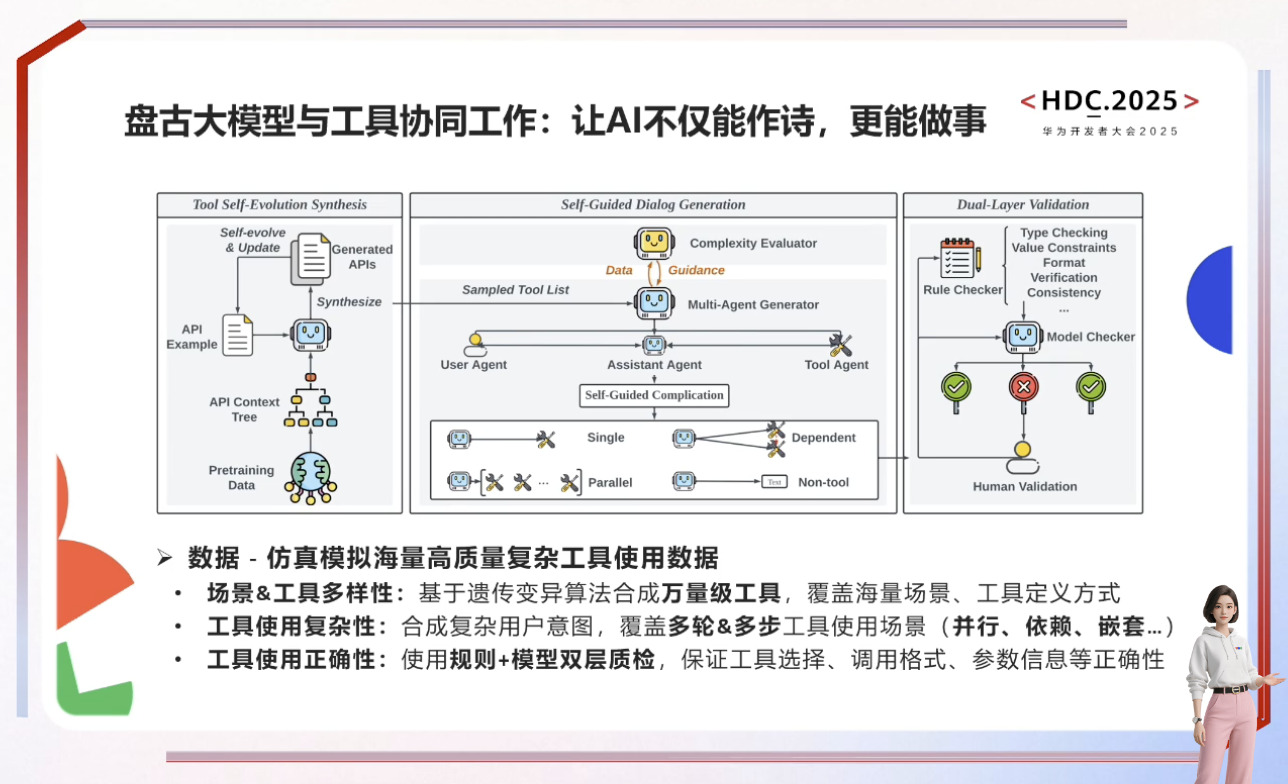
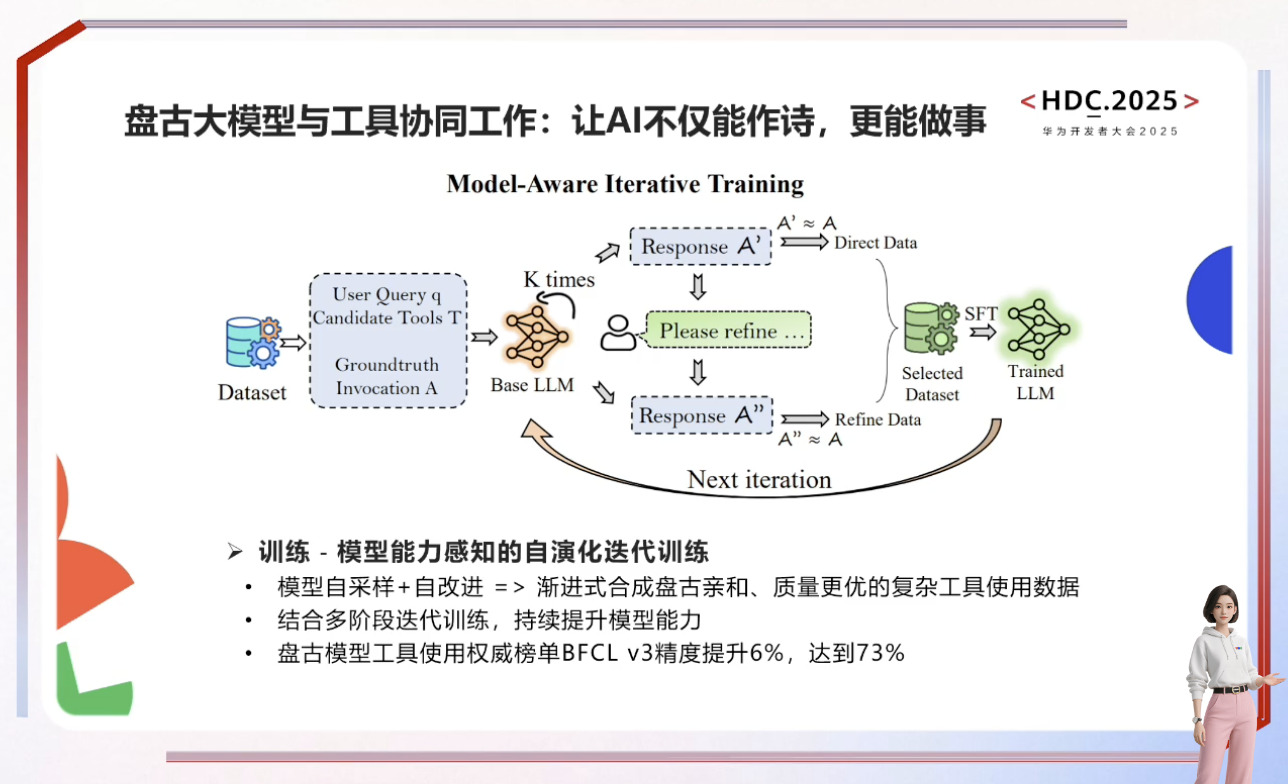
自动驾驶与具身智能的发展依赖于世界模型和虚拟环境的构建,通过数字孪生和4D物理空间模拟真实世界规律以解决训练数据不足和安全性问题。盘古NLP大模型借助外部工具提升行业智能水平,而具身智能需融合3D空间理解、物理推理及行为预测能力,最终实现在高危场景中超越人类的目标。尽管发展曲折,但SFT训练链条和通用机器人愿景已展现潜力,预测大模型则致力于打破数据孤岛,通过原子级表达实现跨场景统一推演,推动AI向善与社会效率提升。
基础模型
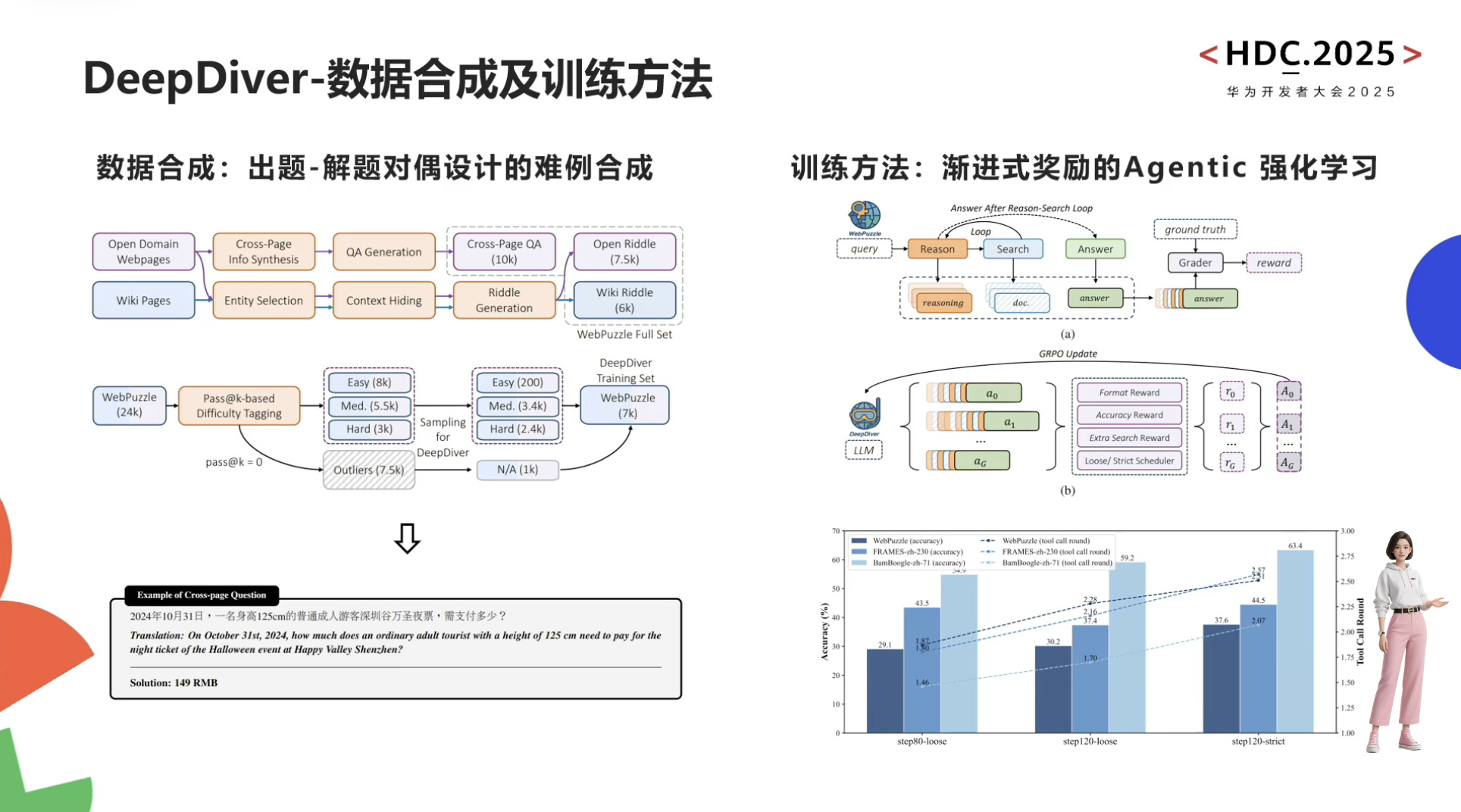
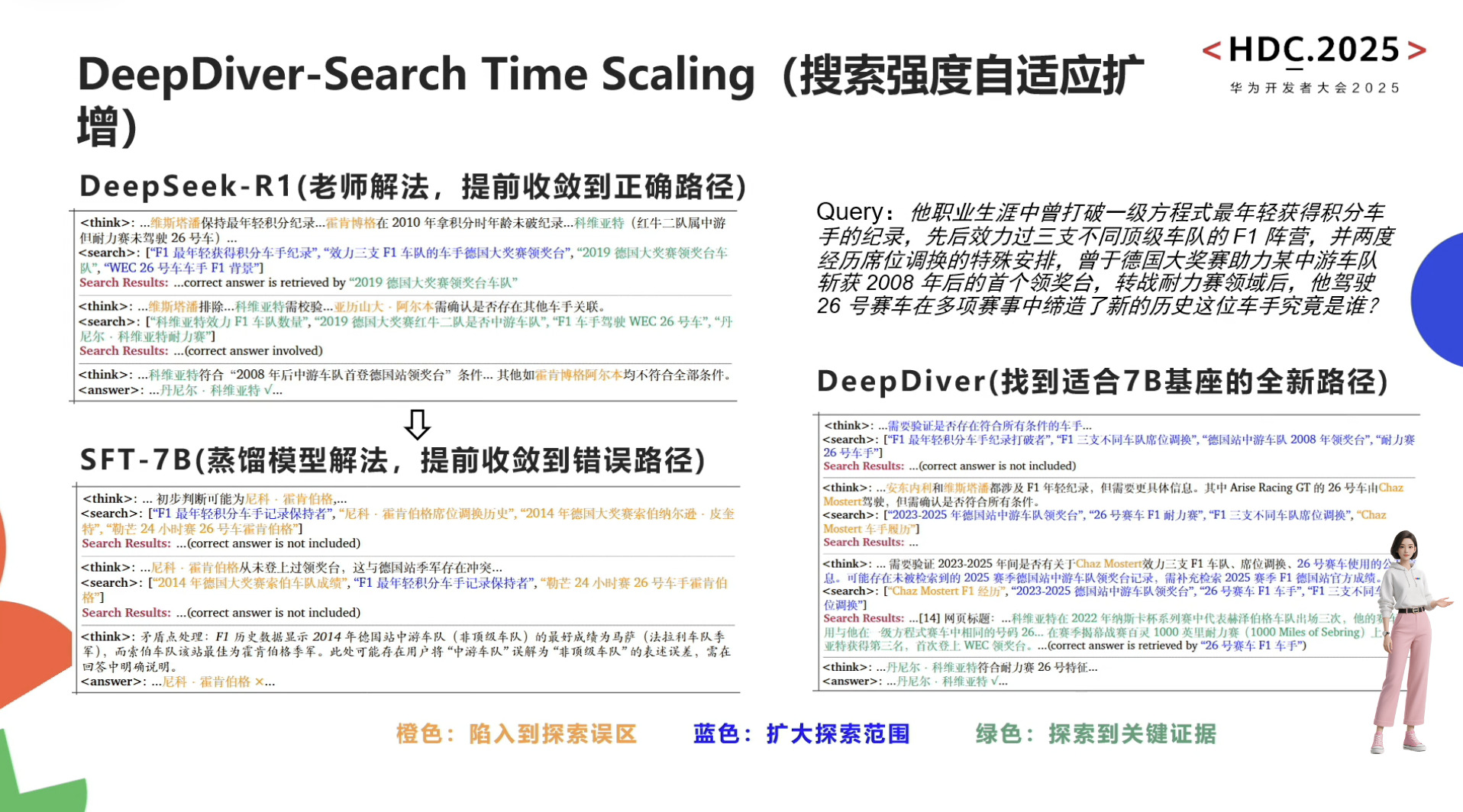
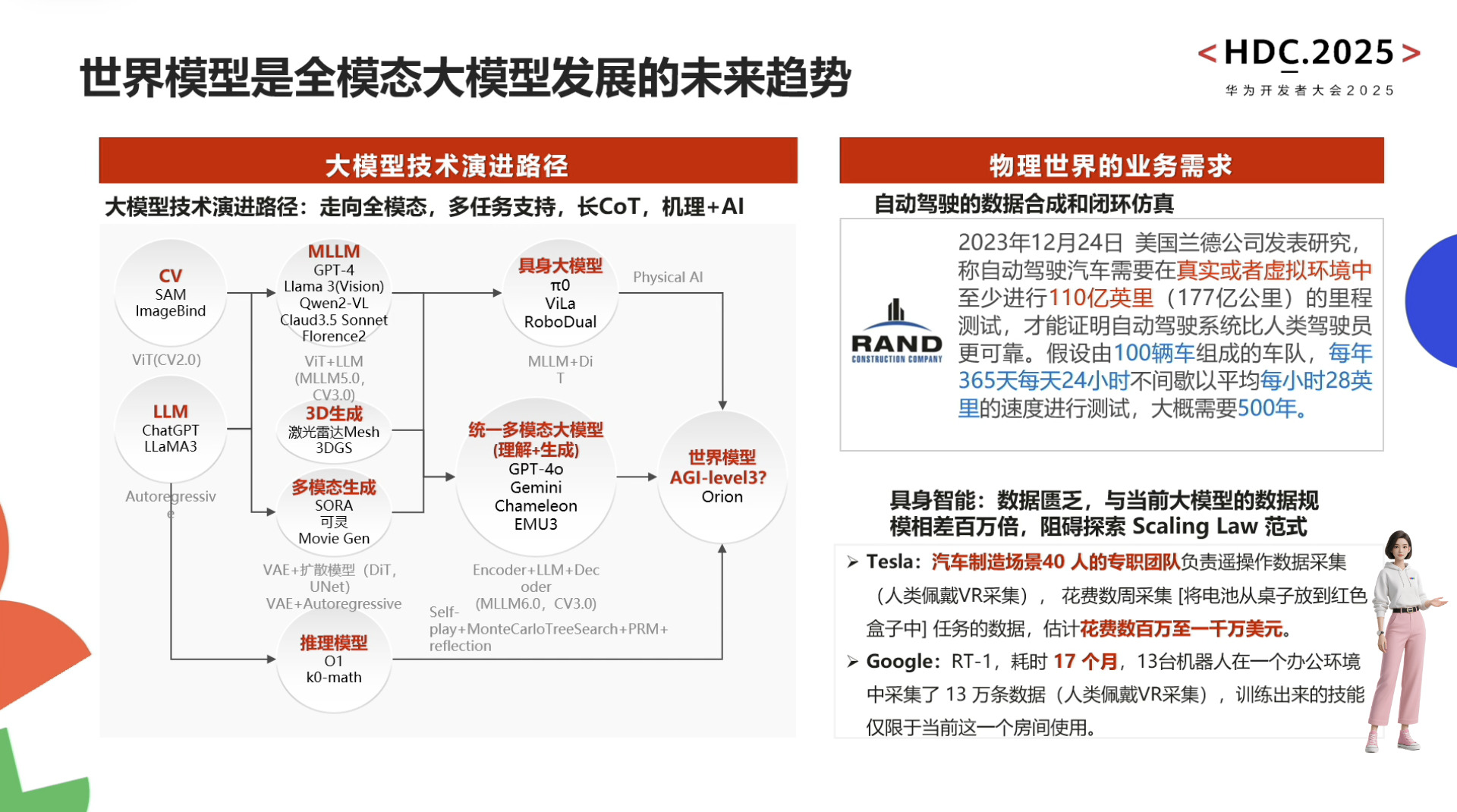
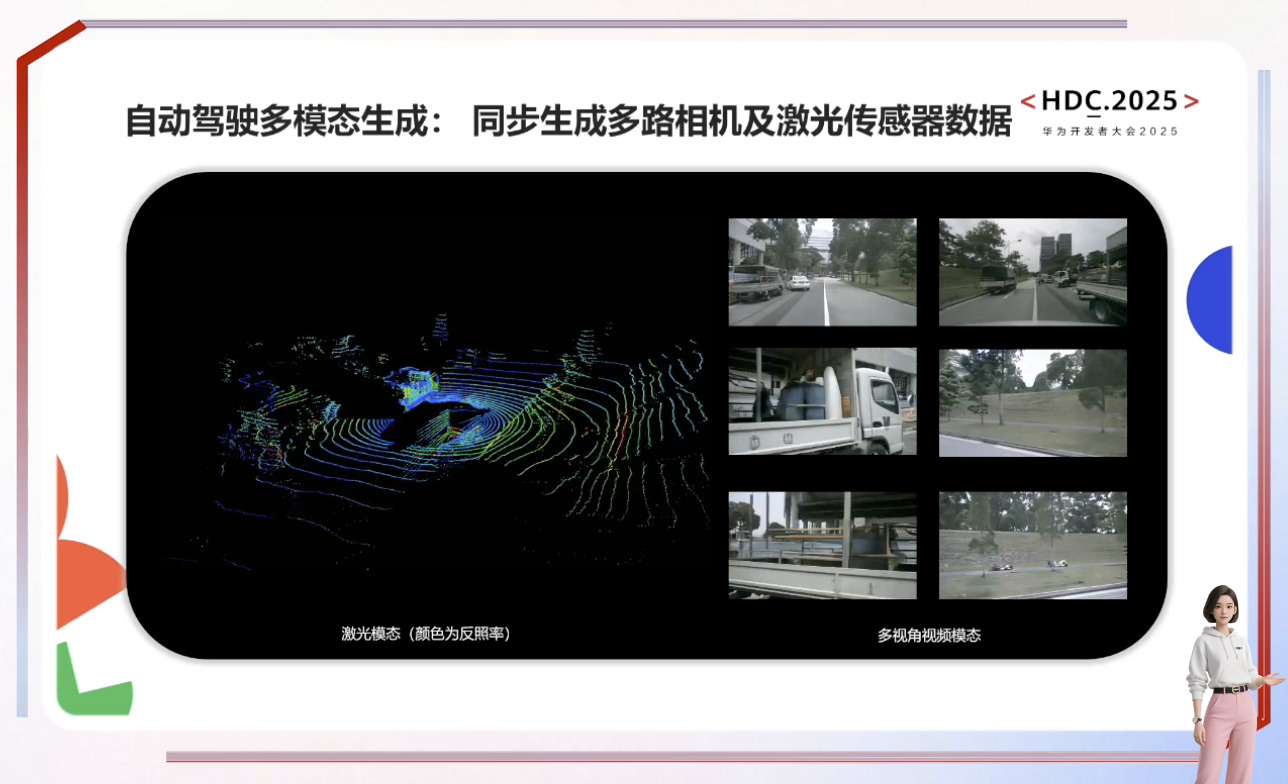
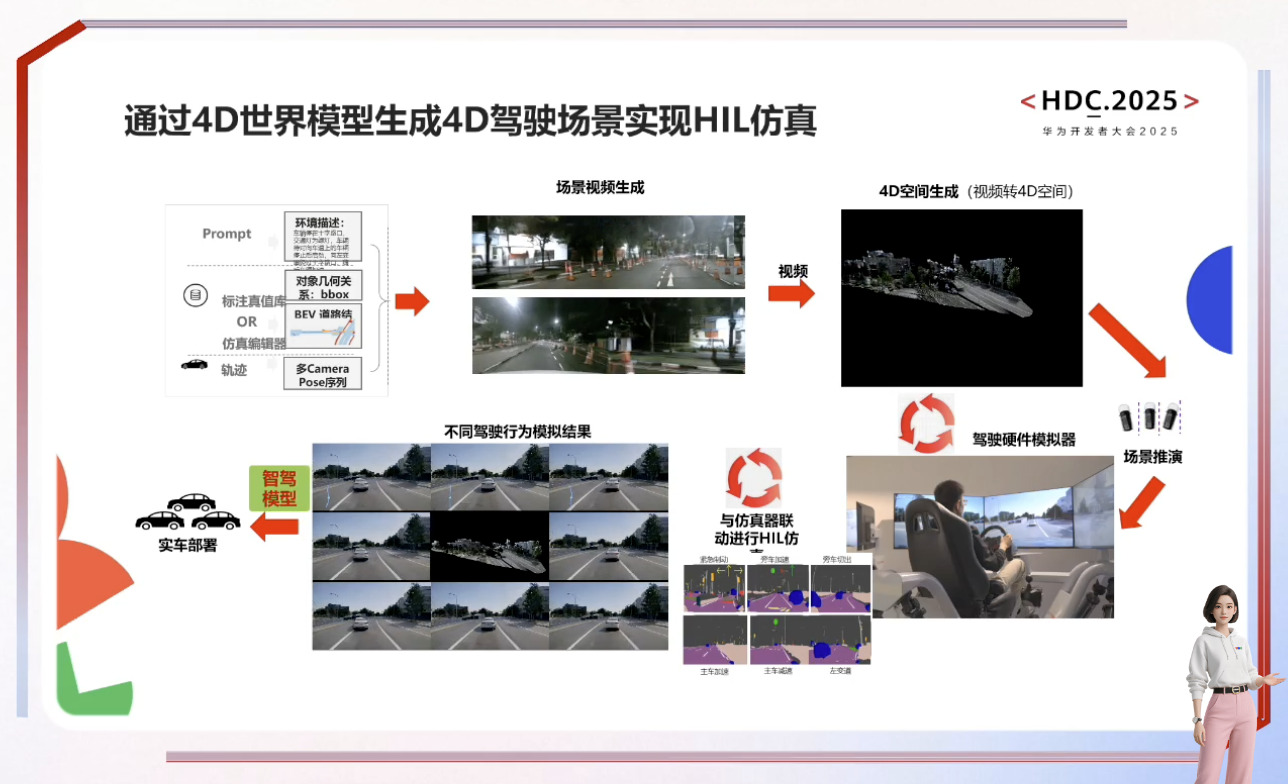
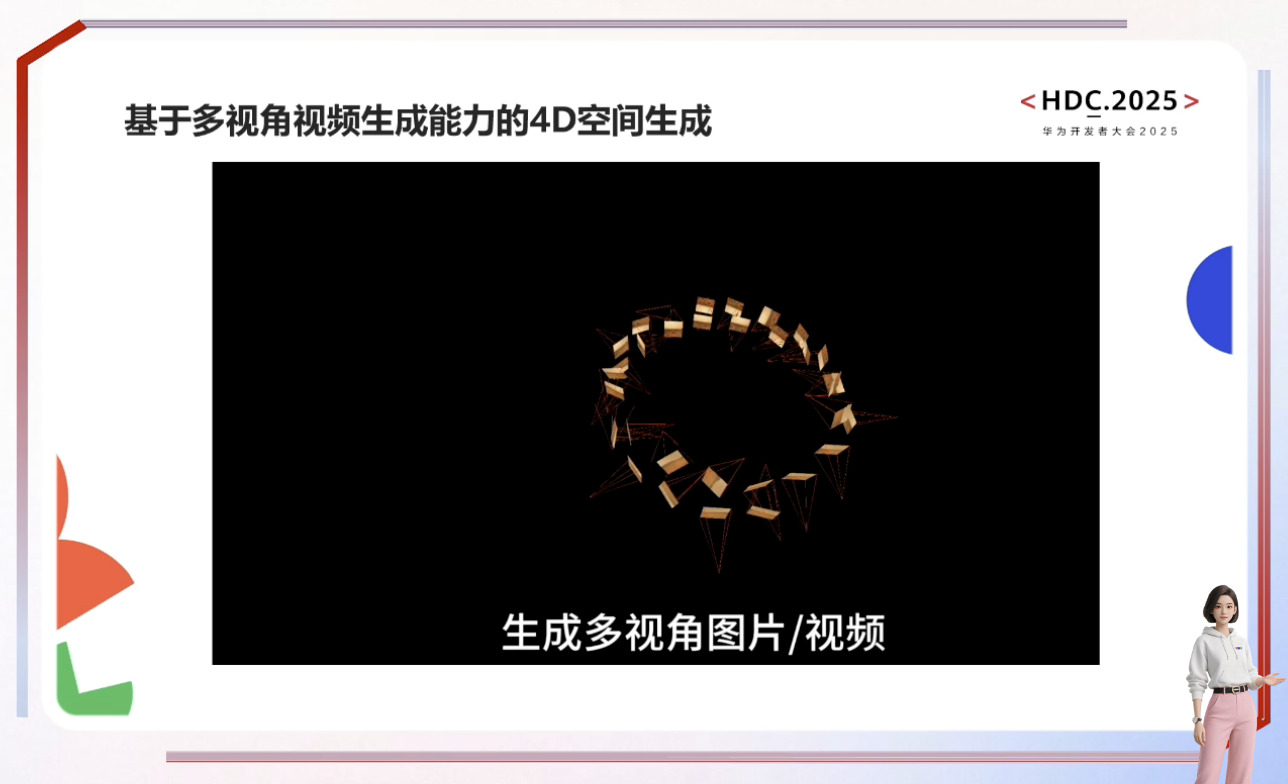
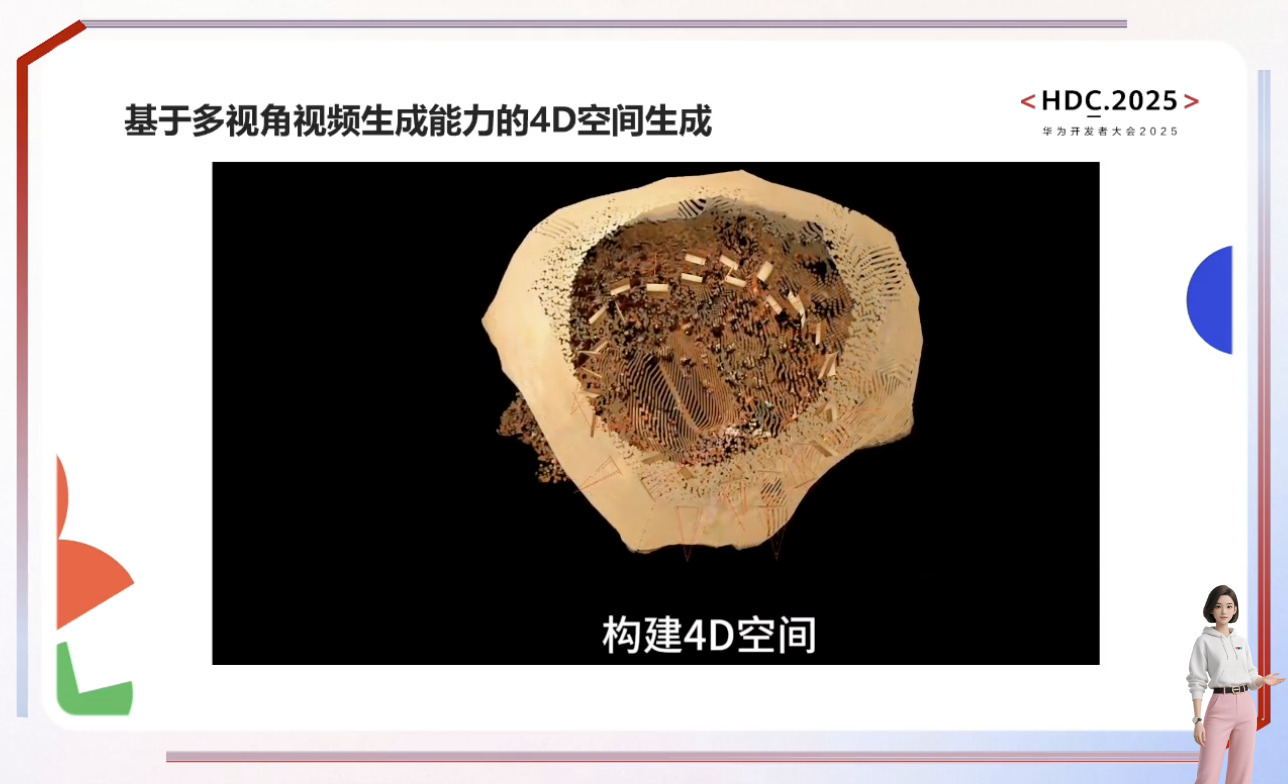
世界模型








具身智能









预测大模型







参考资料
自动驾驶与具身智能的发展依赖于世界模型和虚拟环境的构建,通过数字孪生和4D物理空间模拟真实世界规律以解决训练数据不足和安全性问题。盘古NLP大模型借助外部工具提升行业智能水平,而具身智能需融合3D空间理解、物理推理及行为预测能力,最终实现在高危场景中超越人类的目标。尽管发展曲折,但SFT训练链条和通用机器人愿景已展现潜力,预测大模型则致力于打破数据孤岛,通过原子级表达实现跨场景统一推演,推动AI向善与社会效率提升。
基础模型
世界模型
具身智能
预测大模型
参考资料
菜单
创建 Notebook
工作目录:/home/ma-user/work
下载模型
安装 modelscope
pip install --upgrade modelscope
SDK 下载模型脚本
编辑 download.py 文件
#模型下载
from modelscope import snapshot_download
model_dir = snapshot_download('Qwen/Qwen1.5-7B-Chat')
设置下载路径
export MODELSCOPE_CACHE=/home/ma-user/work
下载
python download.py
查看下载的模型
ll /home/ma-user/work/hub/Qwen/Qwen1___5-7B-Chat
修改模型配置文件
修改配置文件:Qwen/Qwen1___5-7B-Chat/config.json
{
"torch_dtype": "float16",
}
NPU 不支持 bfloat16,模型配置文件需要修改为 float16。
算力切分
查询算力切分模式
sudo npu-smi info -t vnpu-mode
vnpu-mode : docker
查询算力切分模板信息 sudo npu-smi info -t template-info +------------------------------------------------------------------------------------------+ |NPU instance template info is: | |Name AICORE Memory AICPU VPC VENC JPEGD | | GB PNGD VDEC JPEGE | |==========================================================================================| |vir10_3c_16g 10 16 3 4 0 12 | | 0 1 2 | +------------------------------------------------------------------------------------------+ |vir10_4c_16g_m 10 16 4 9 0 24 | | 0 2 4 | +---------------------------