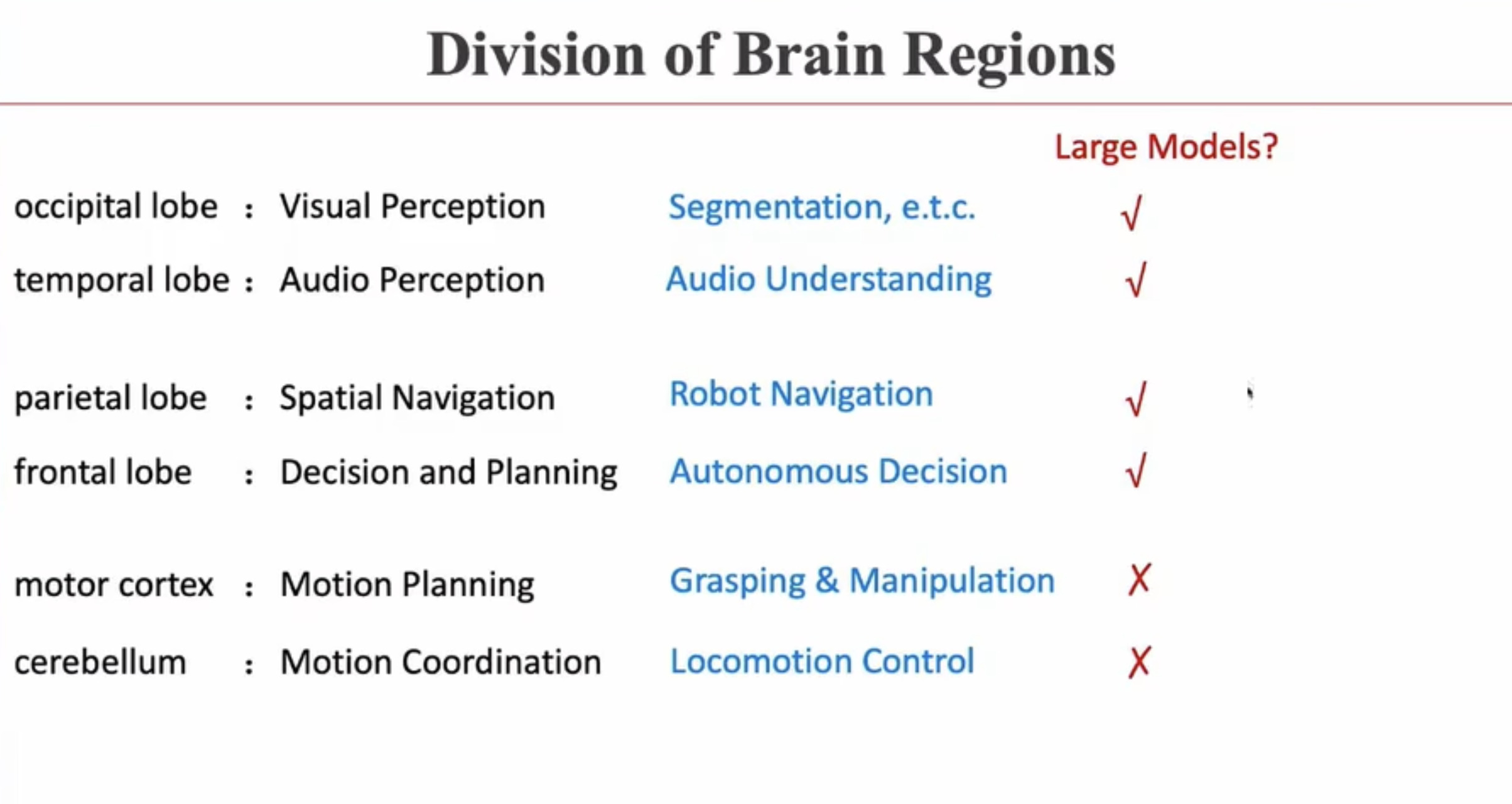
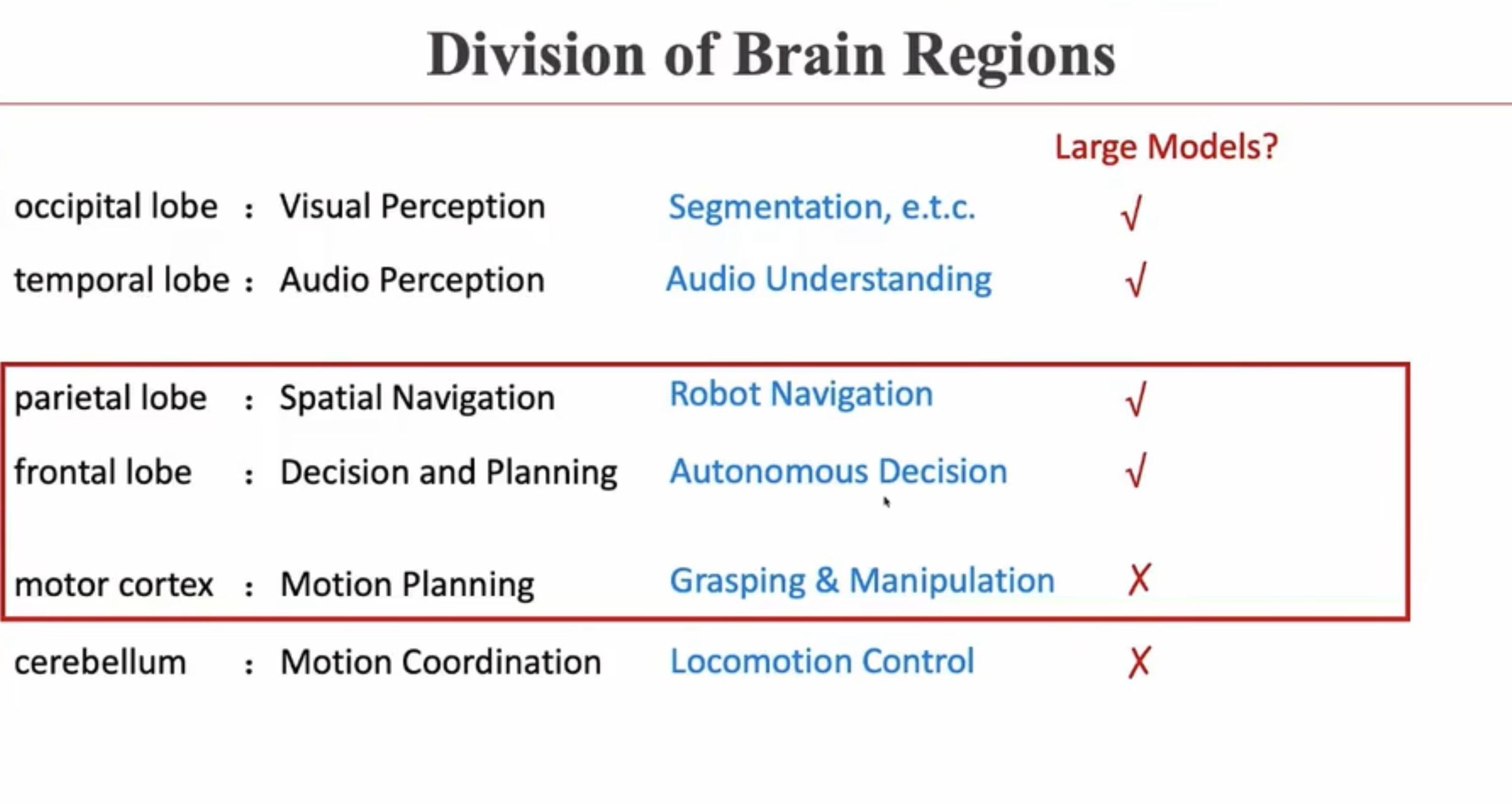
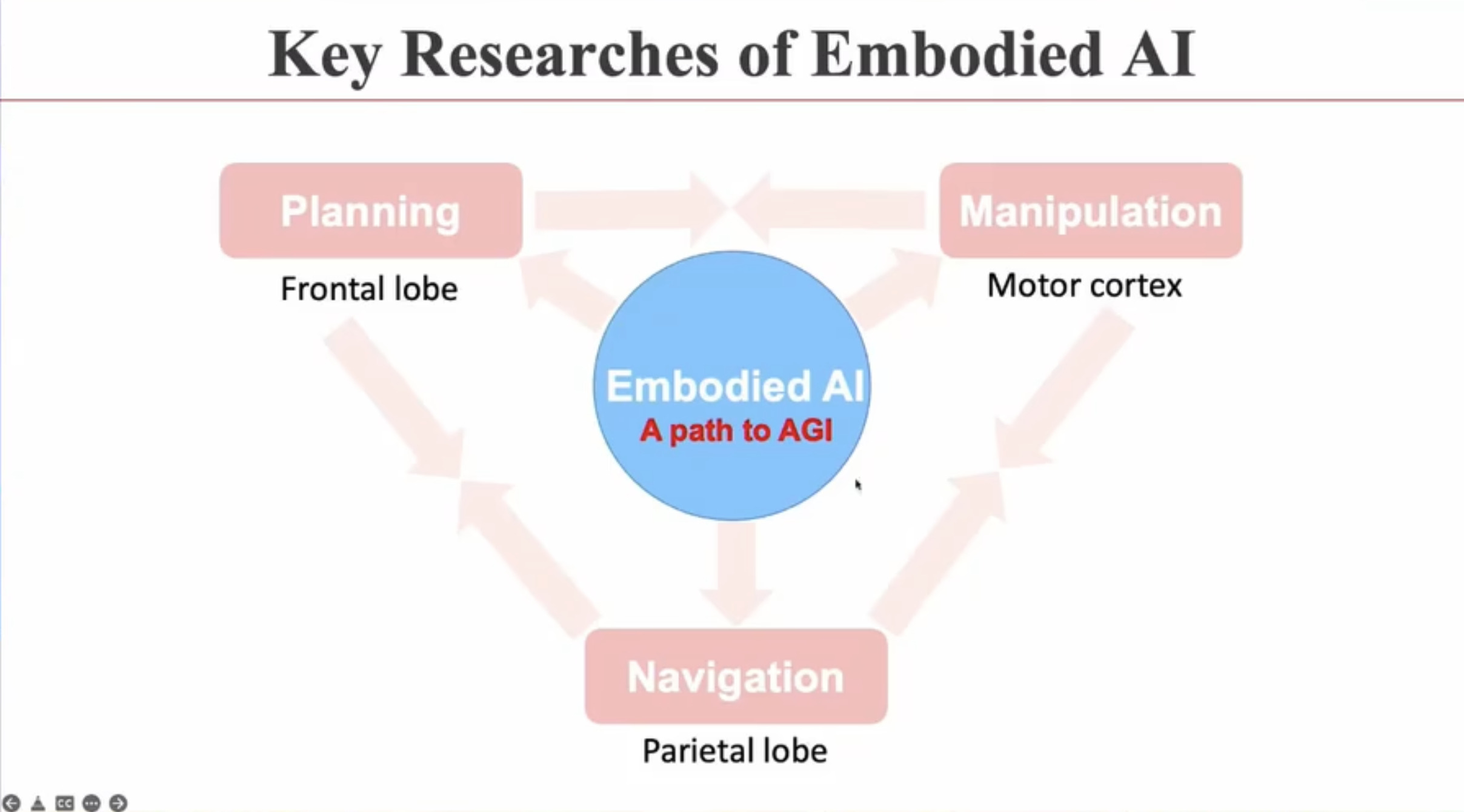
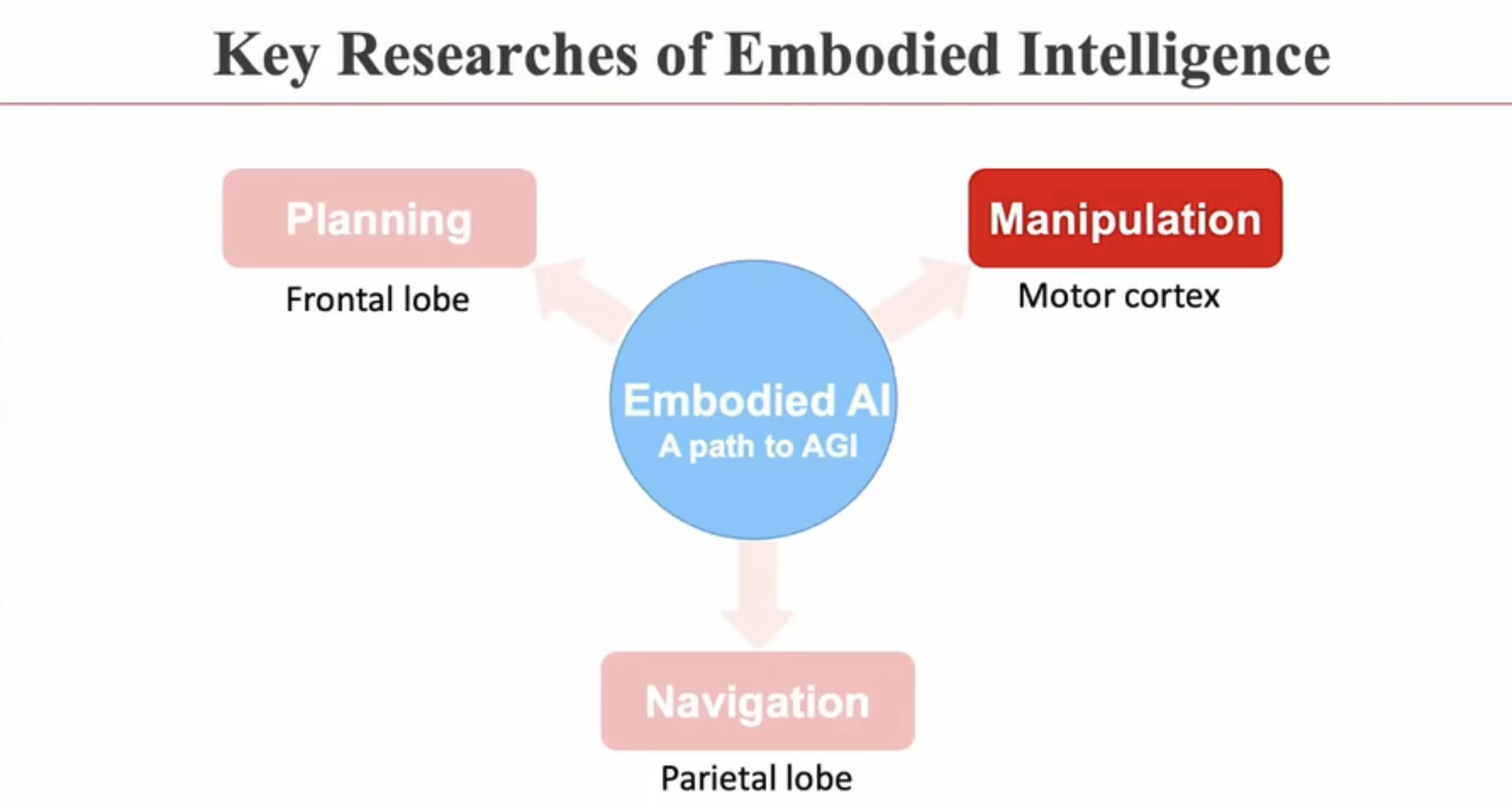
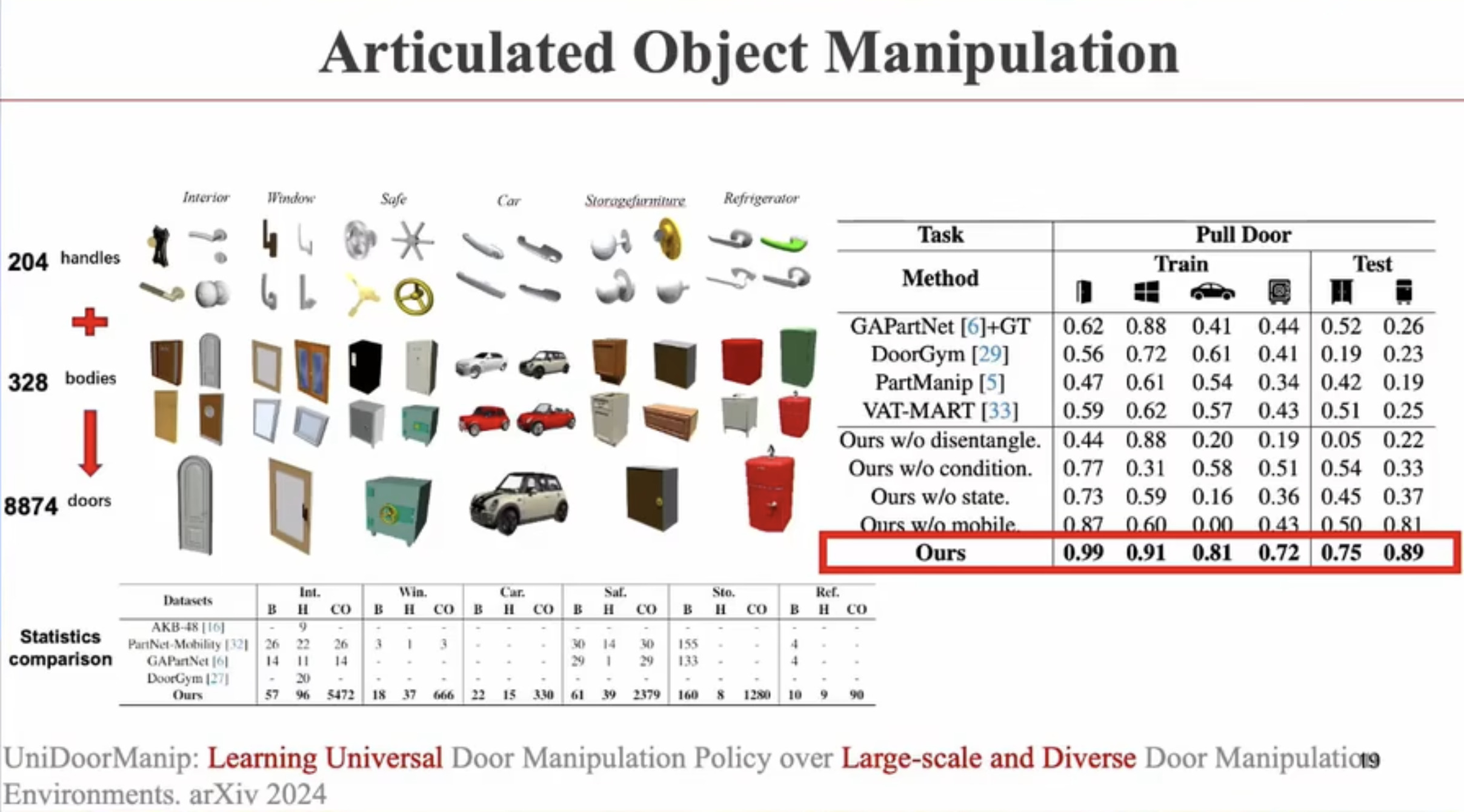
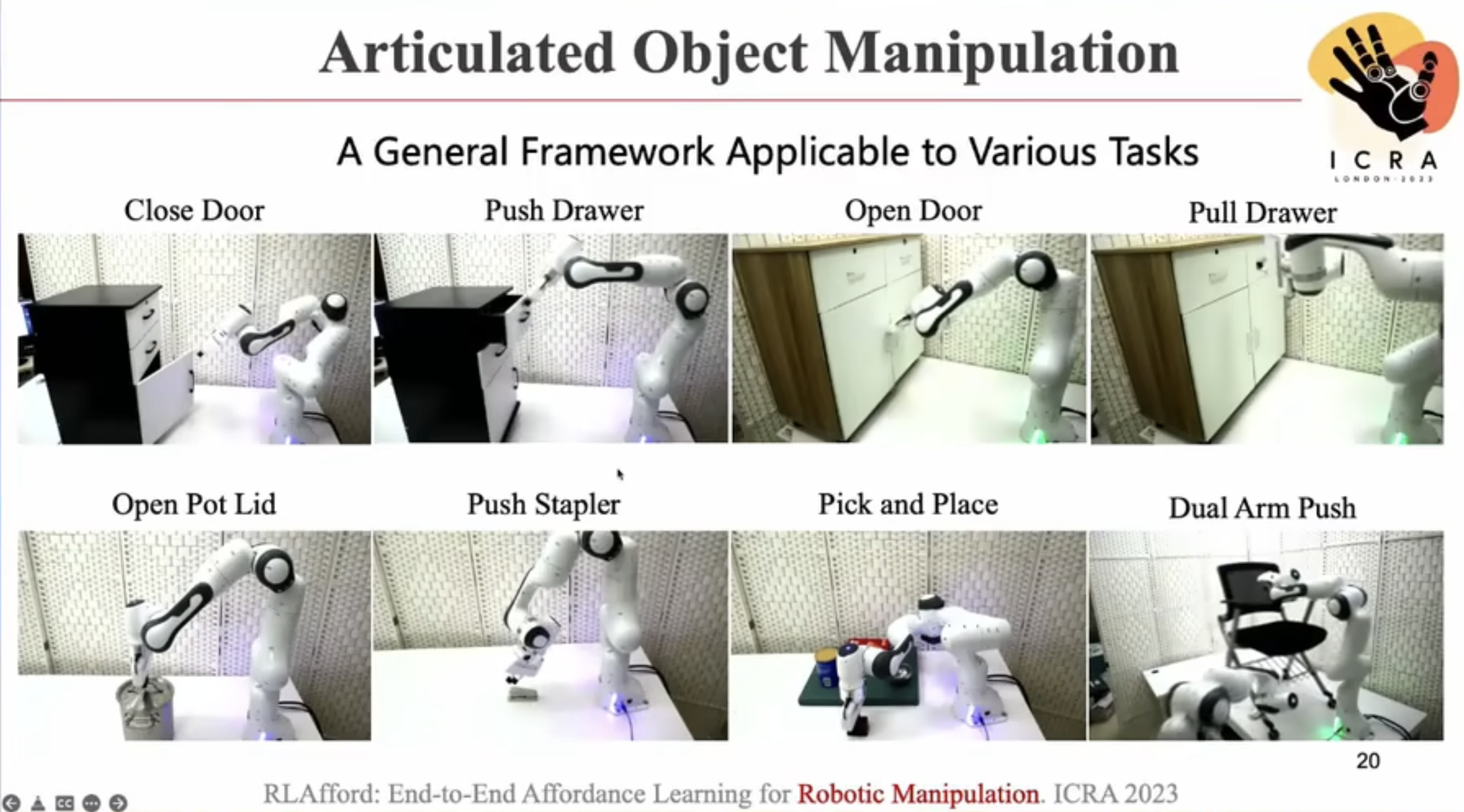
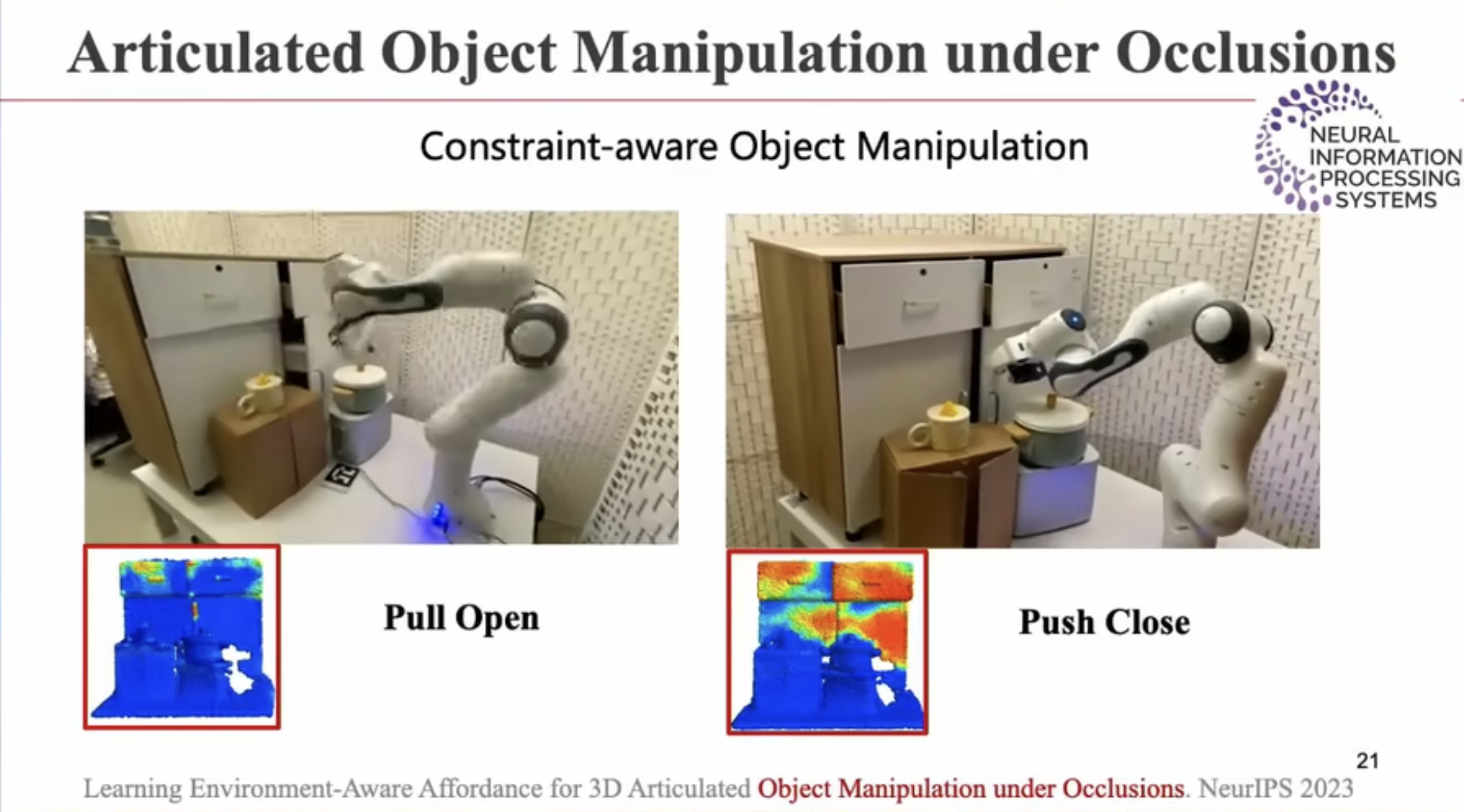
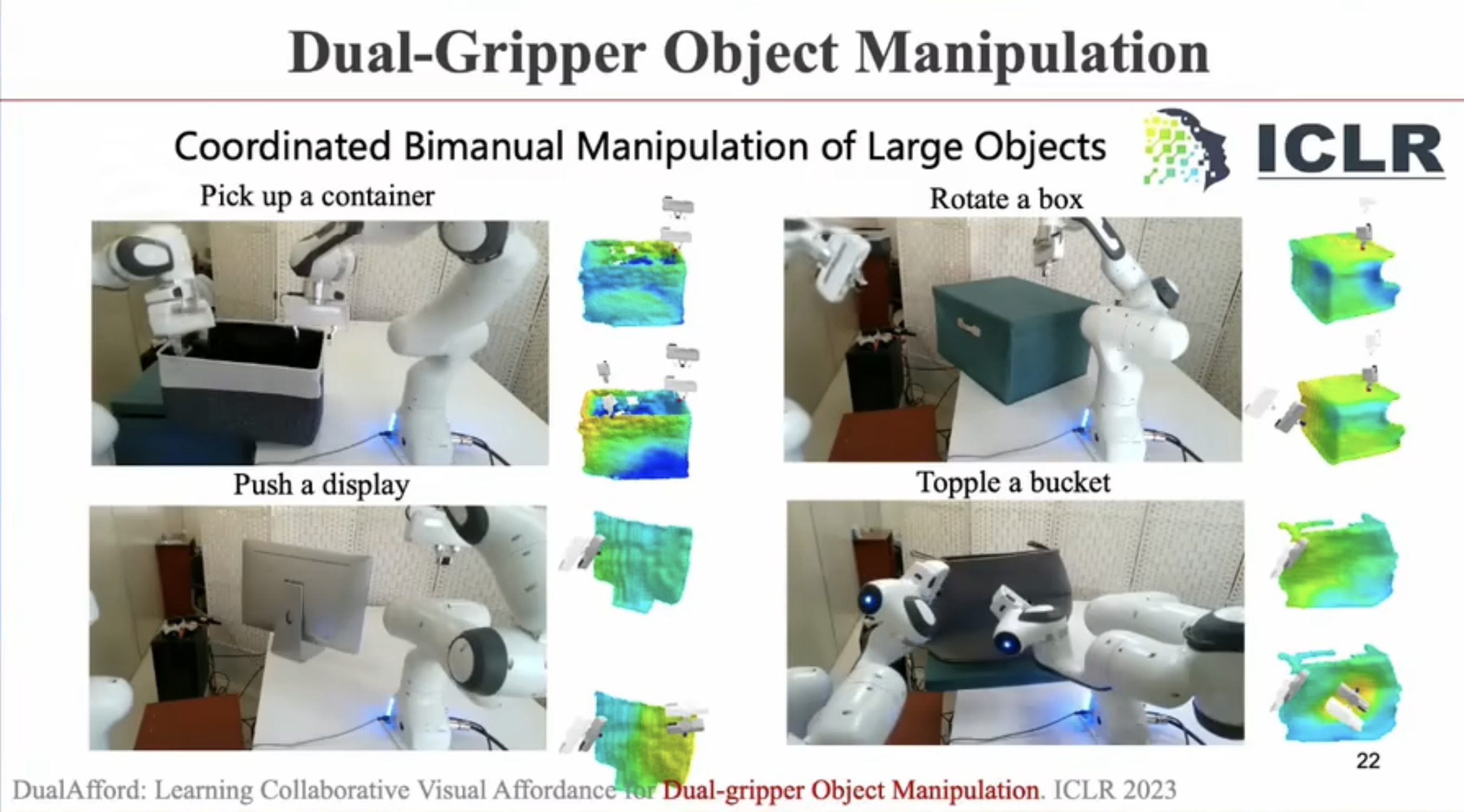
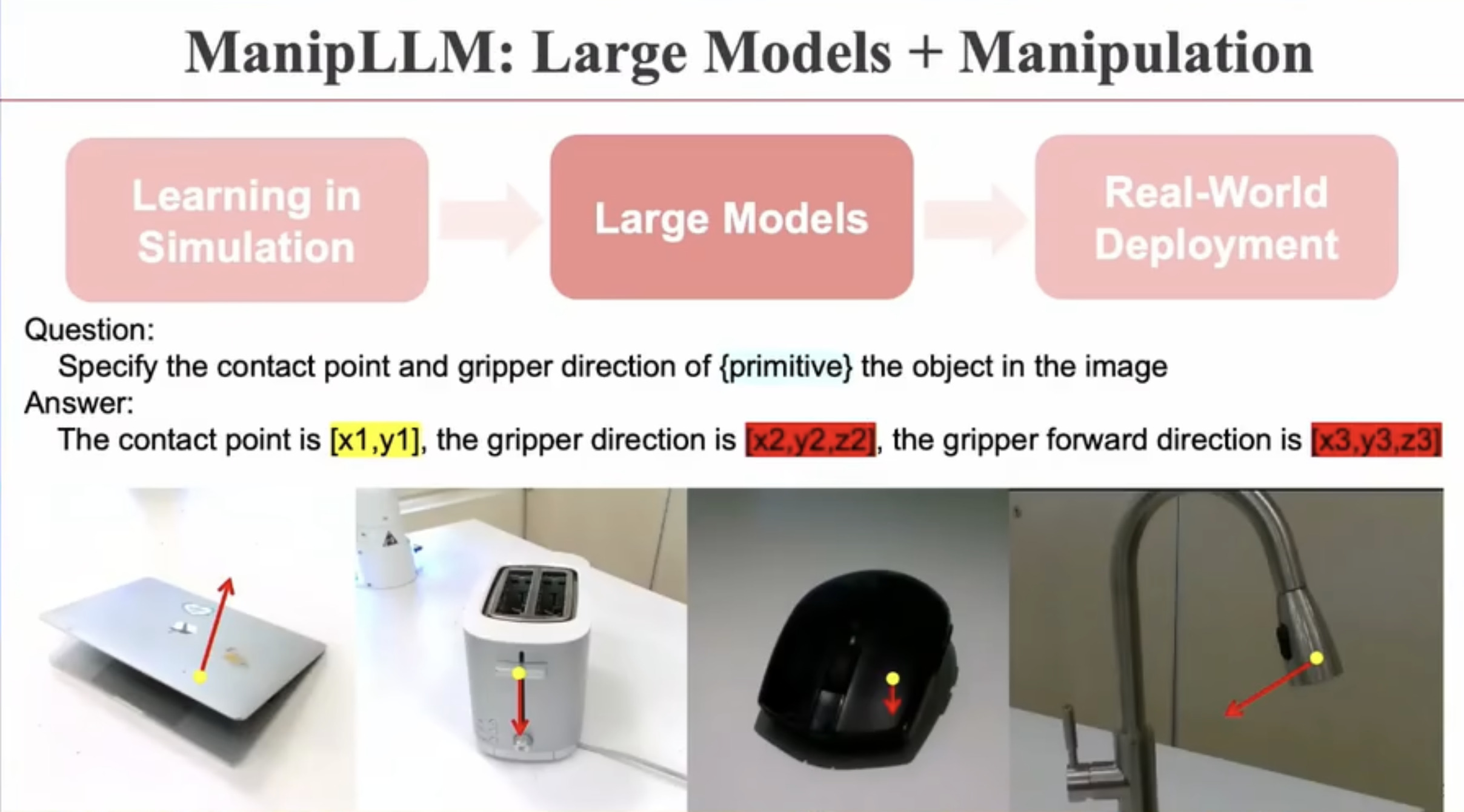
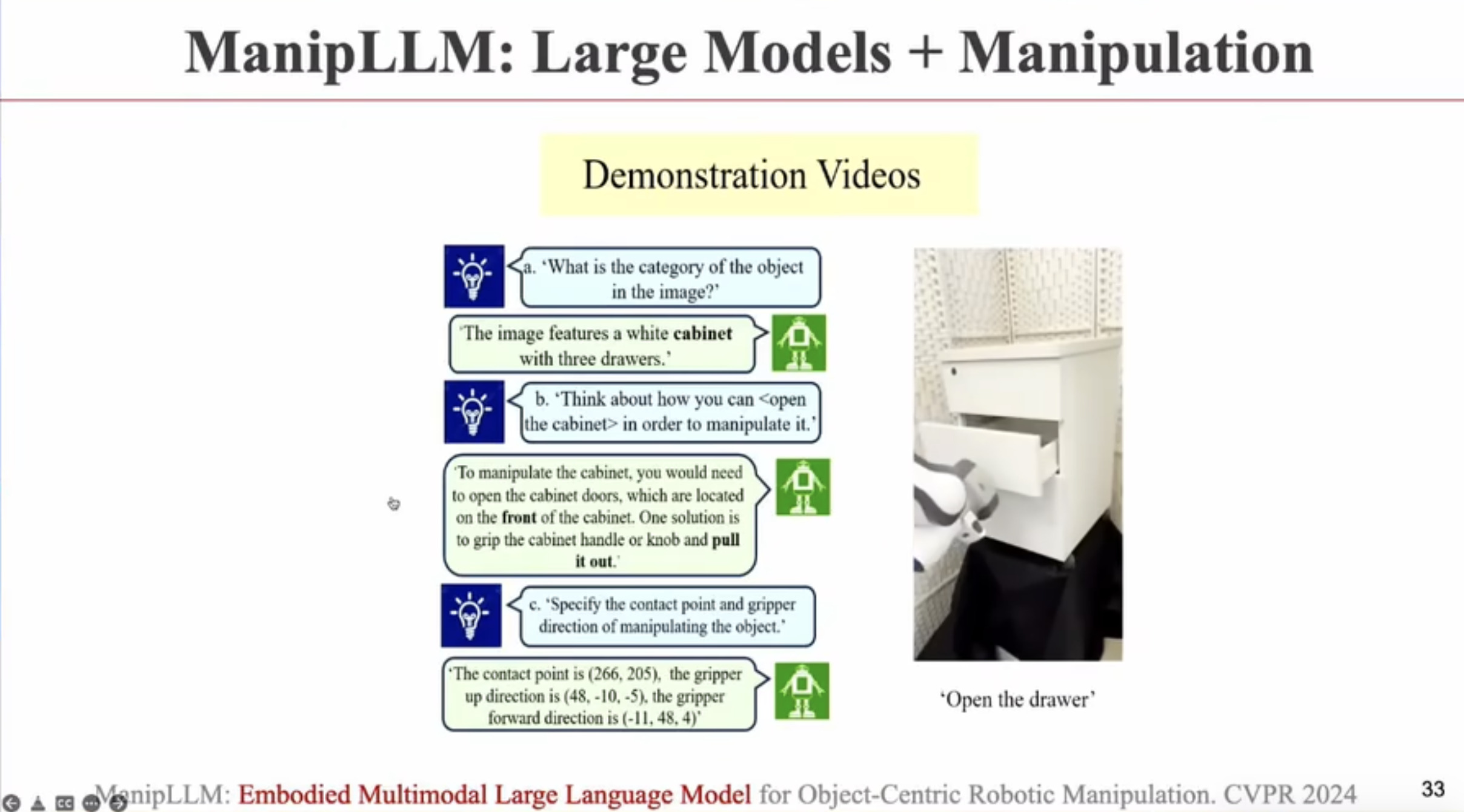
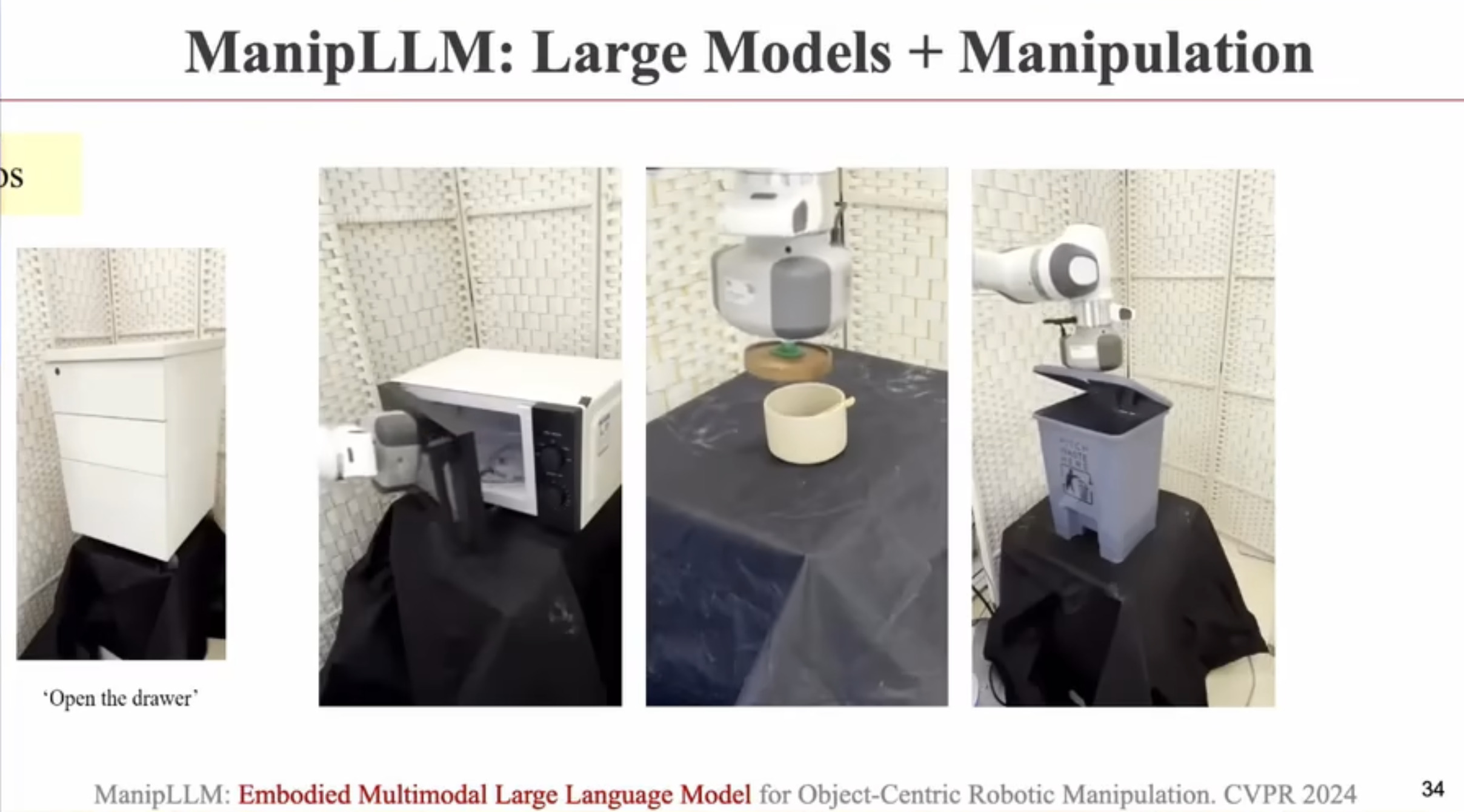
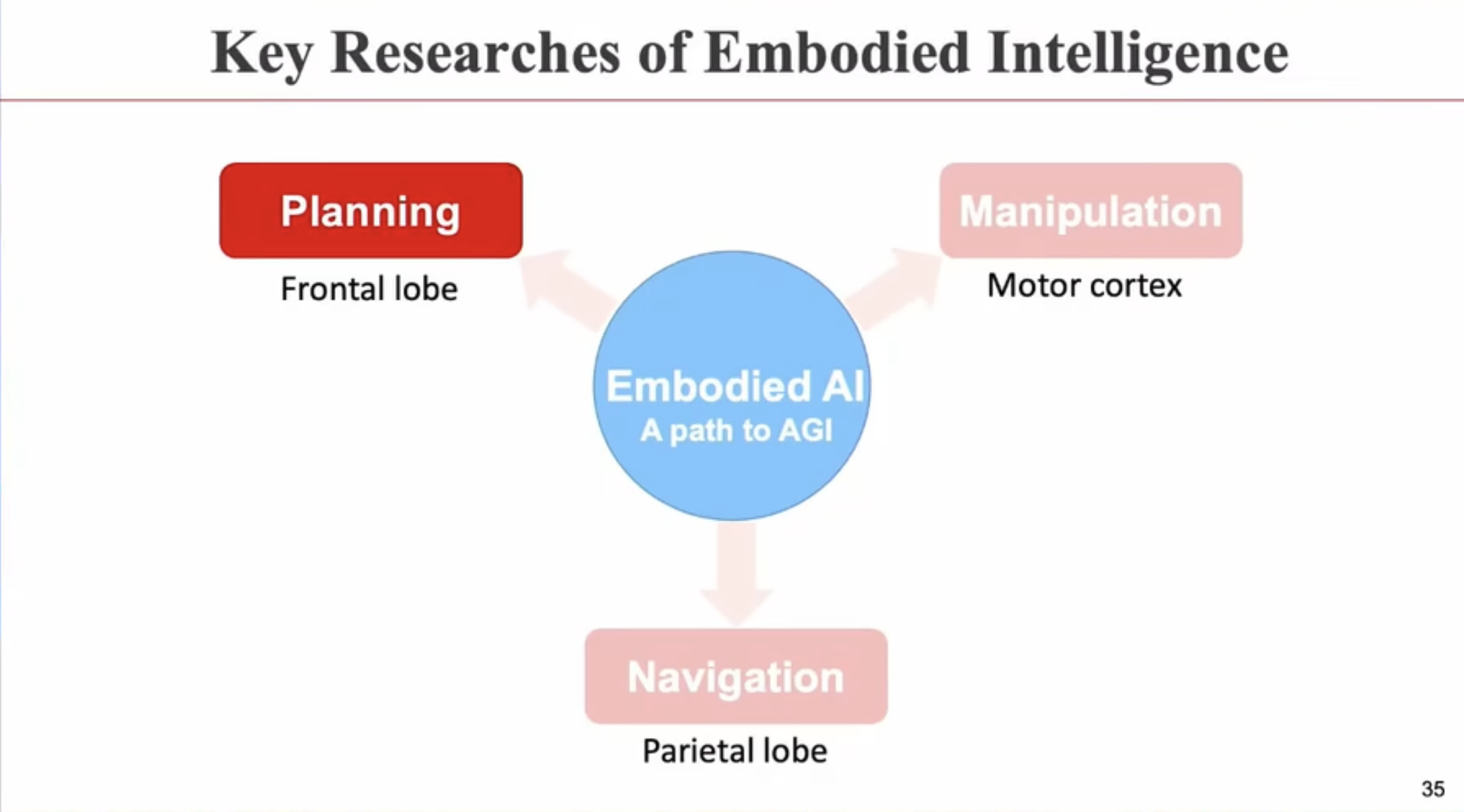
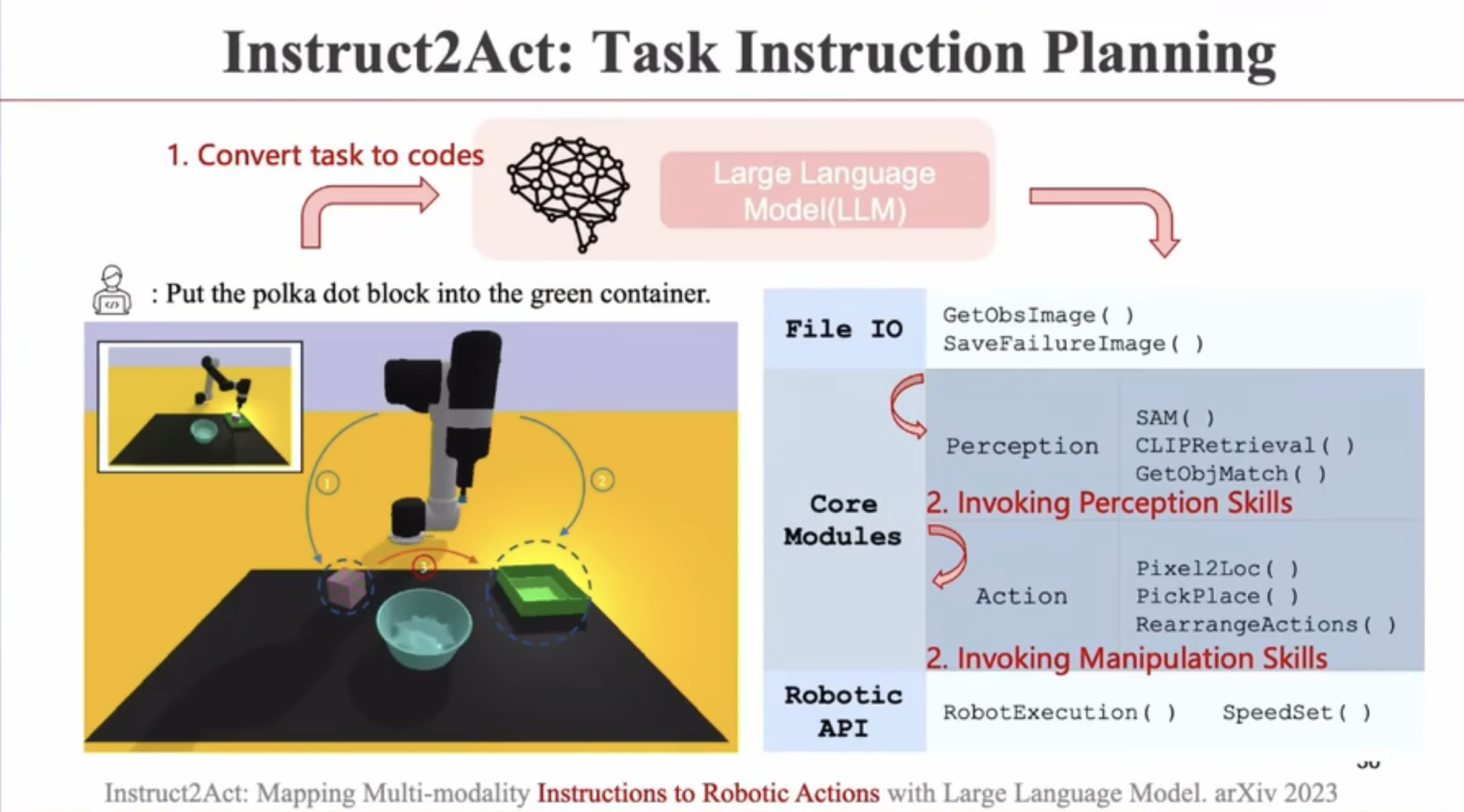
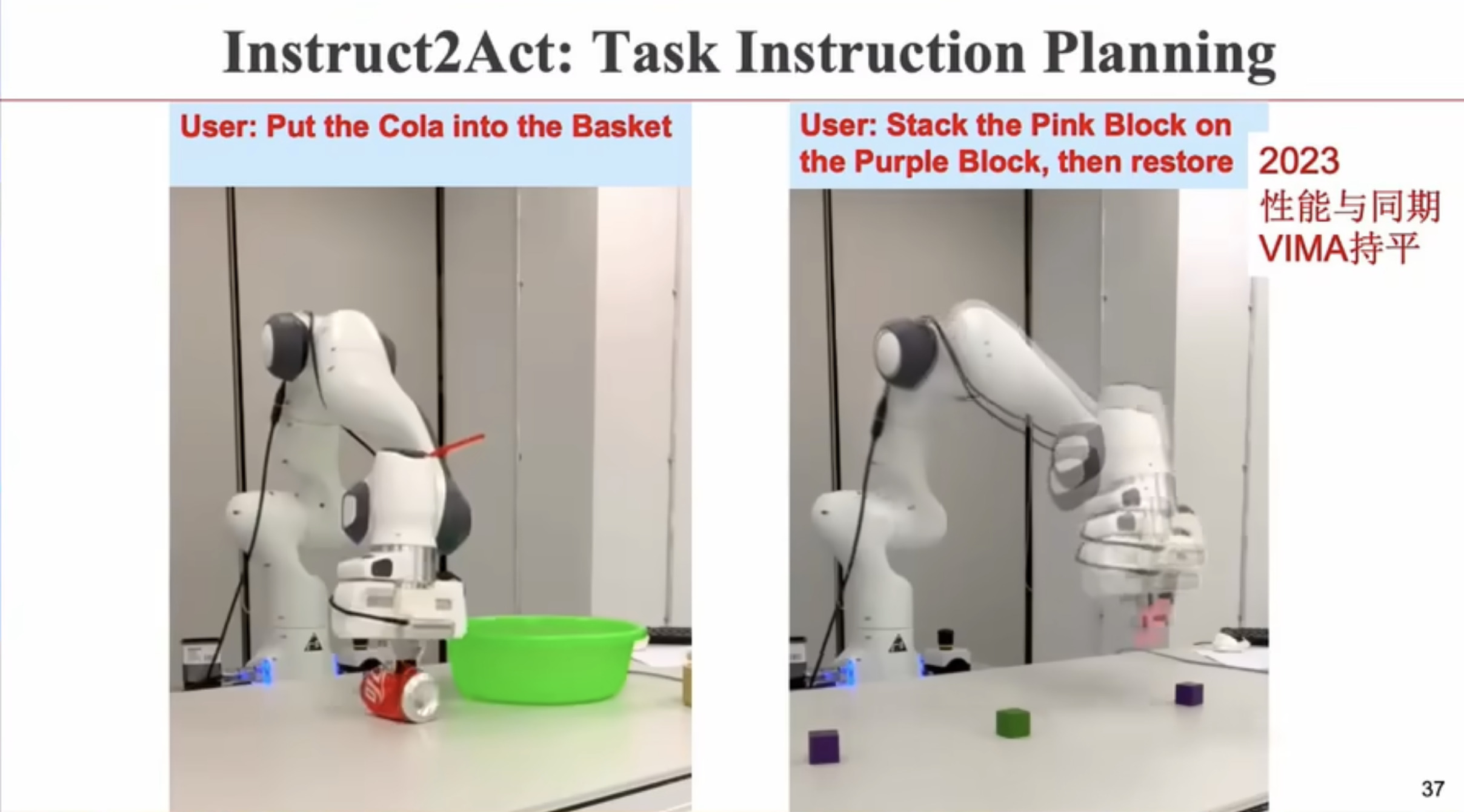
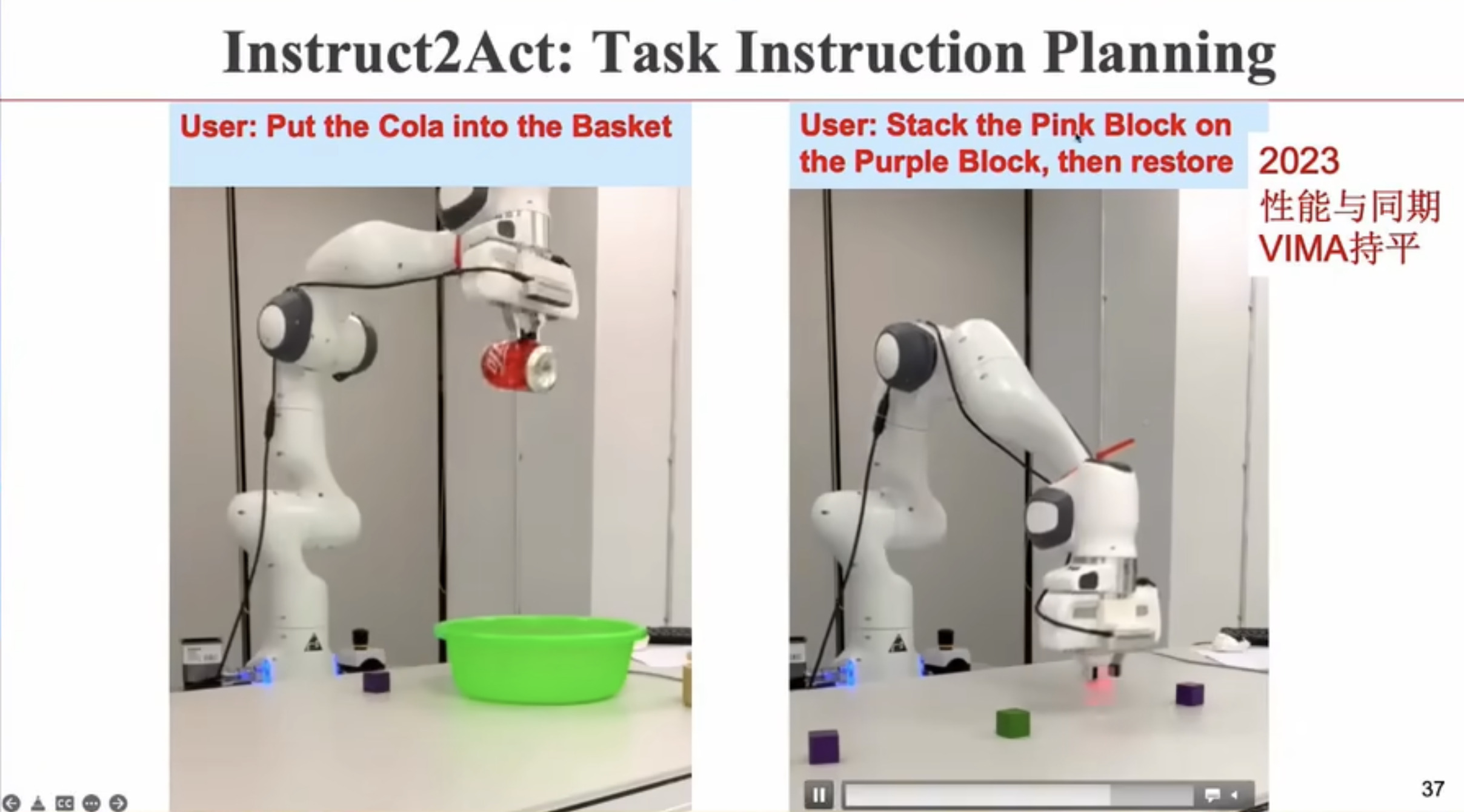
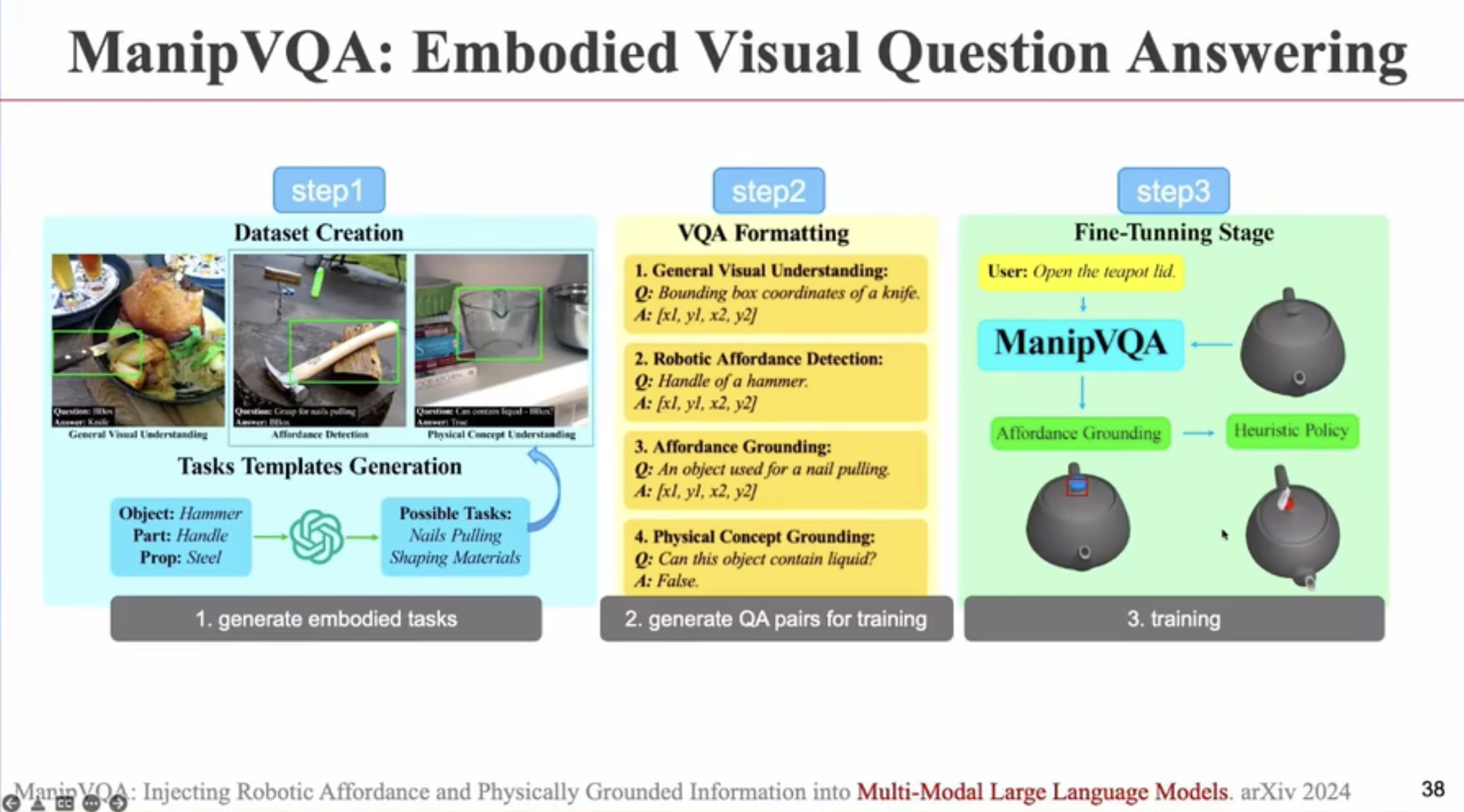
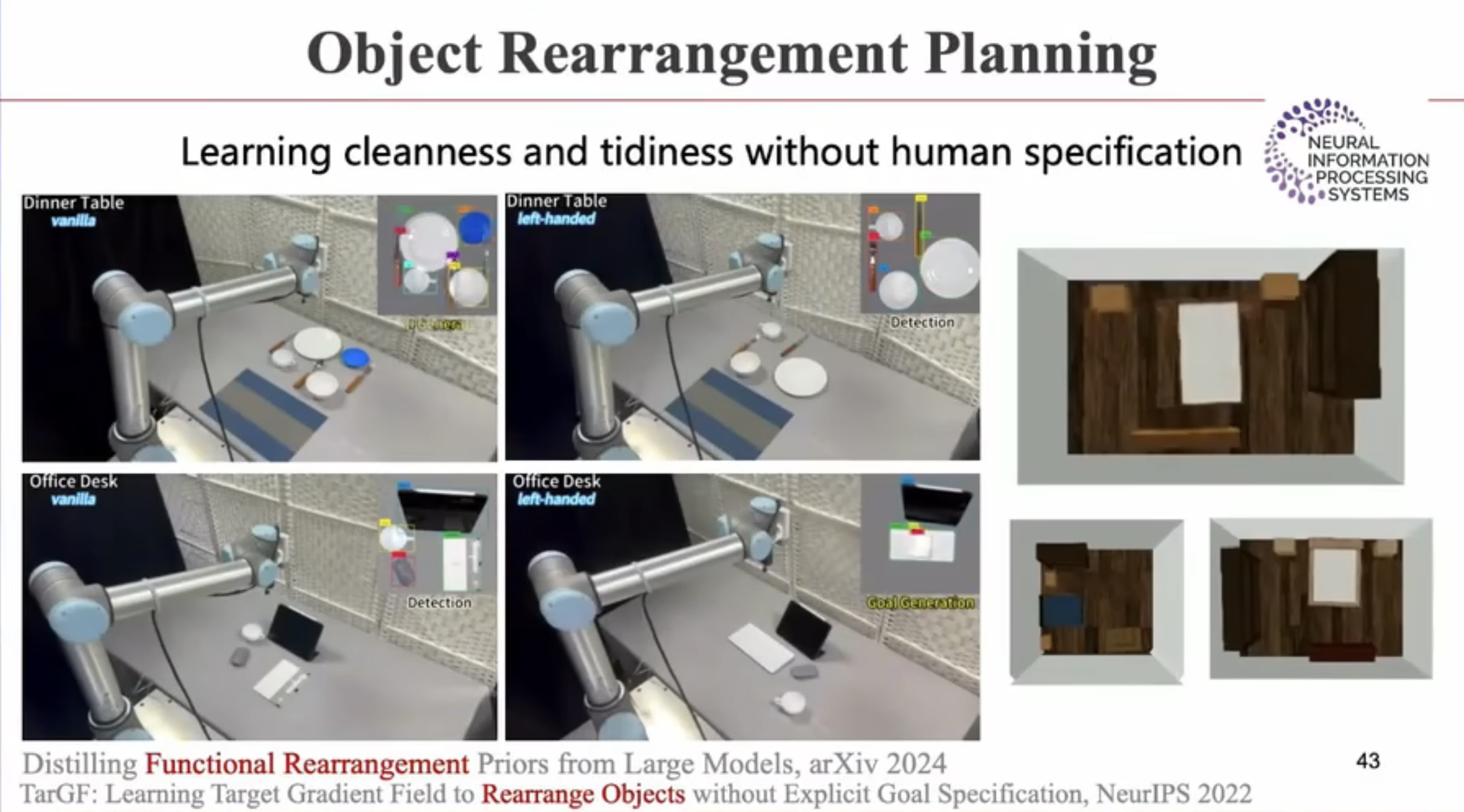
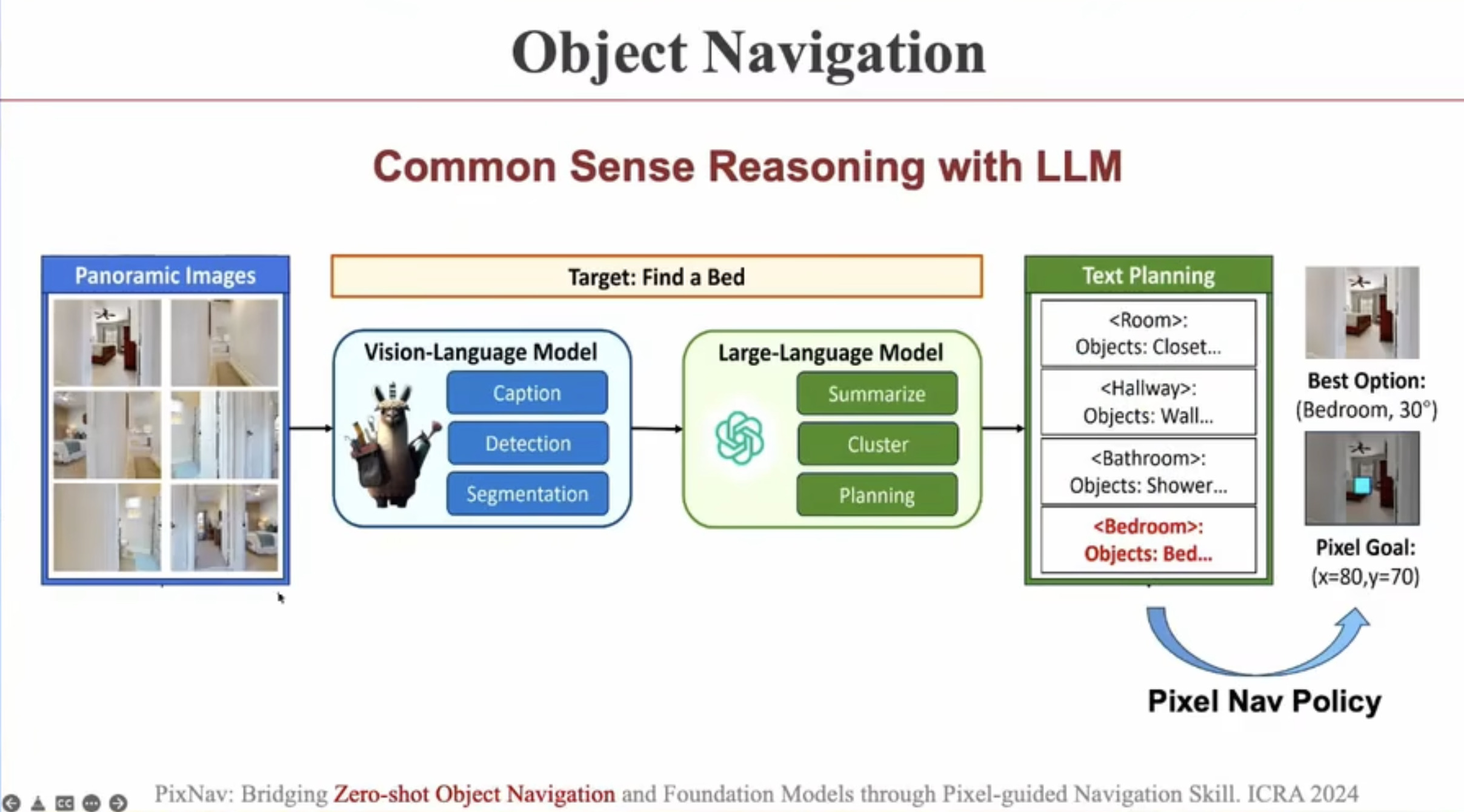
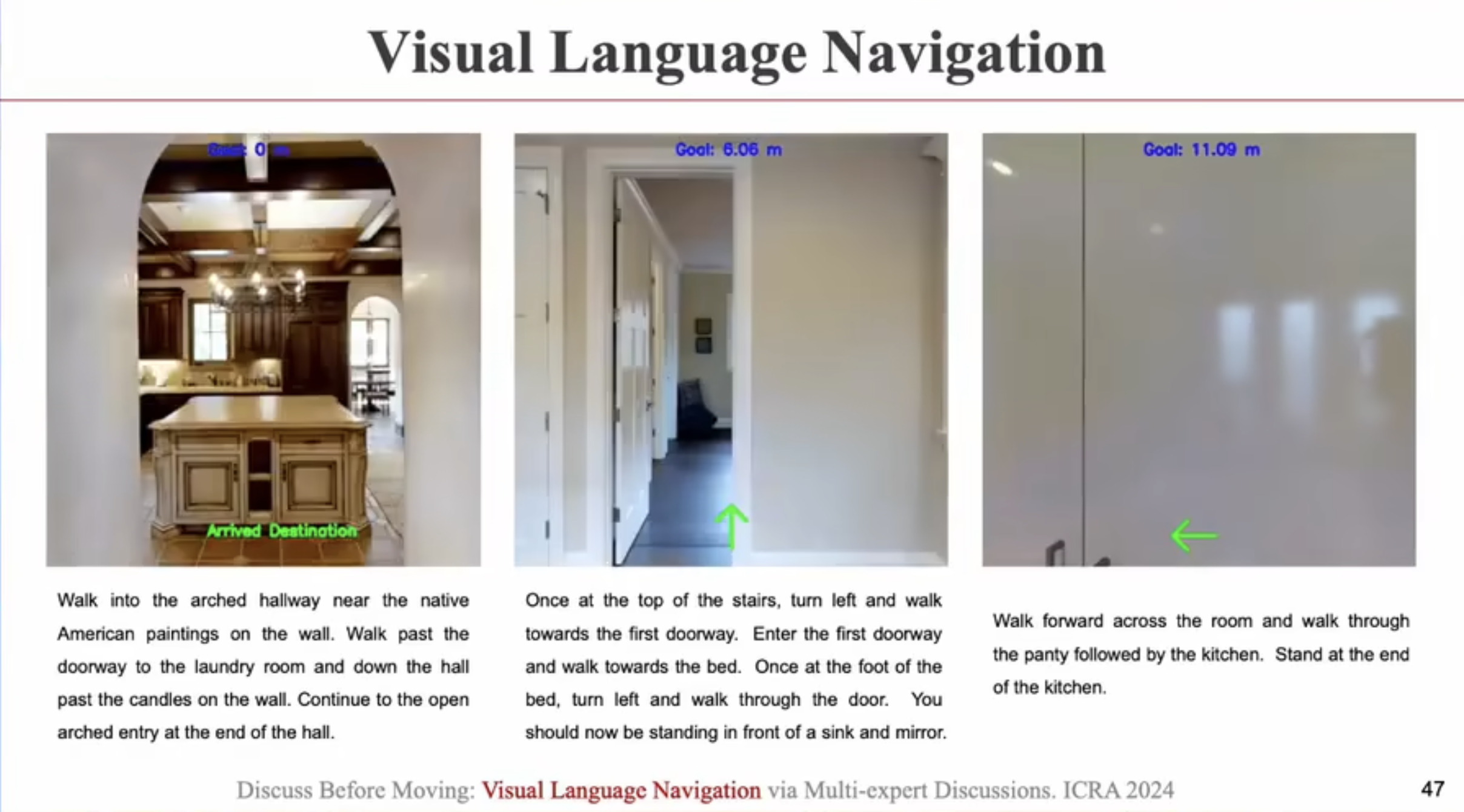
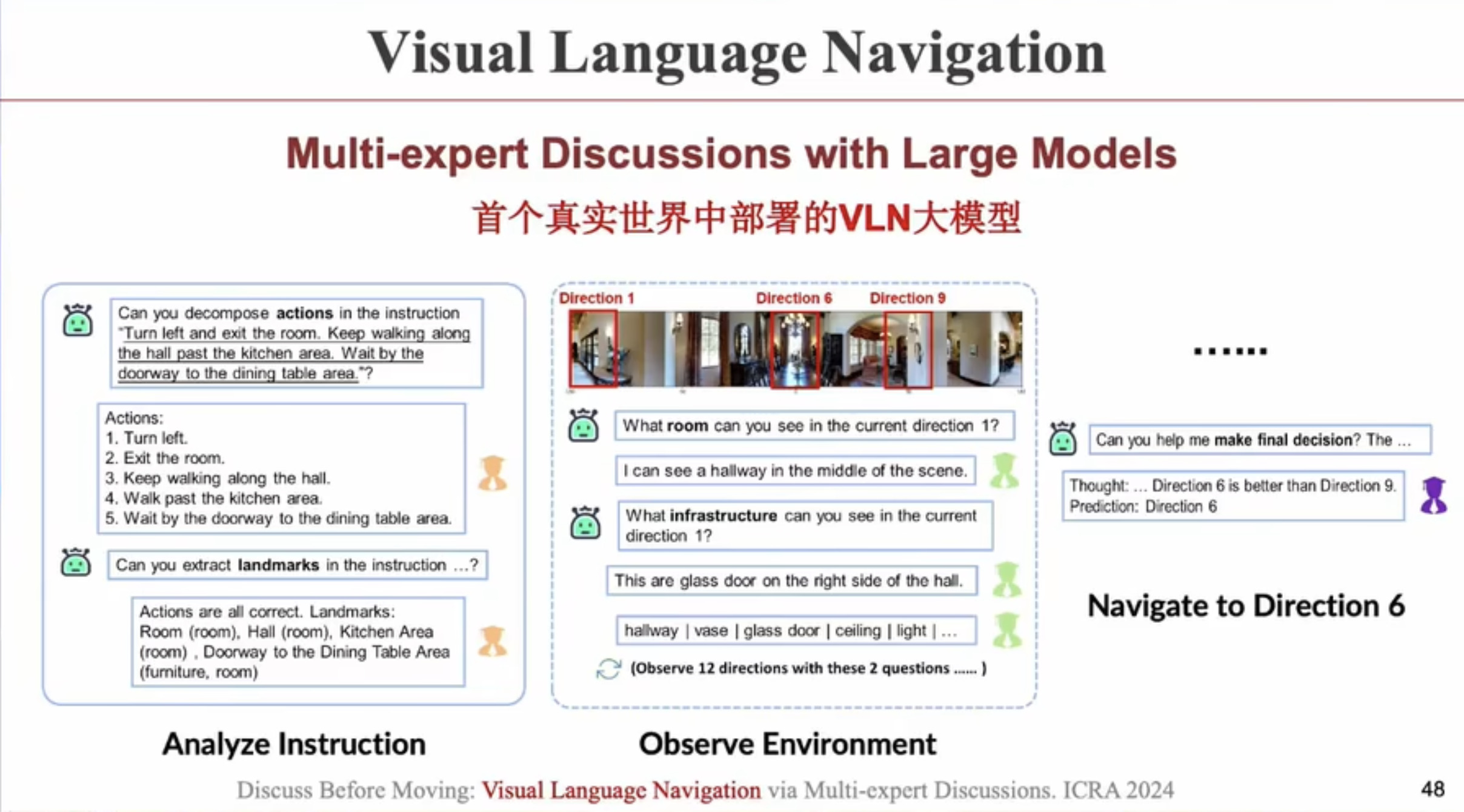
具身智能关键技术研究:操作、规划、导航 【北京大学-董豪】具身智能关键技术研究(操作、规划、导航) 操作(Manipulation) 规划(Planning) 导航(Navigation) 2025-05-11 12:00 · embodied-aivlarobot-manipulationplanningnavigationrt-1manipllmvisual-language-navigation具身智能机器人
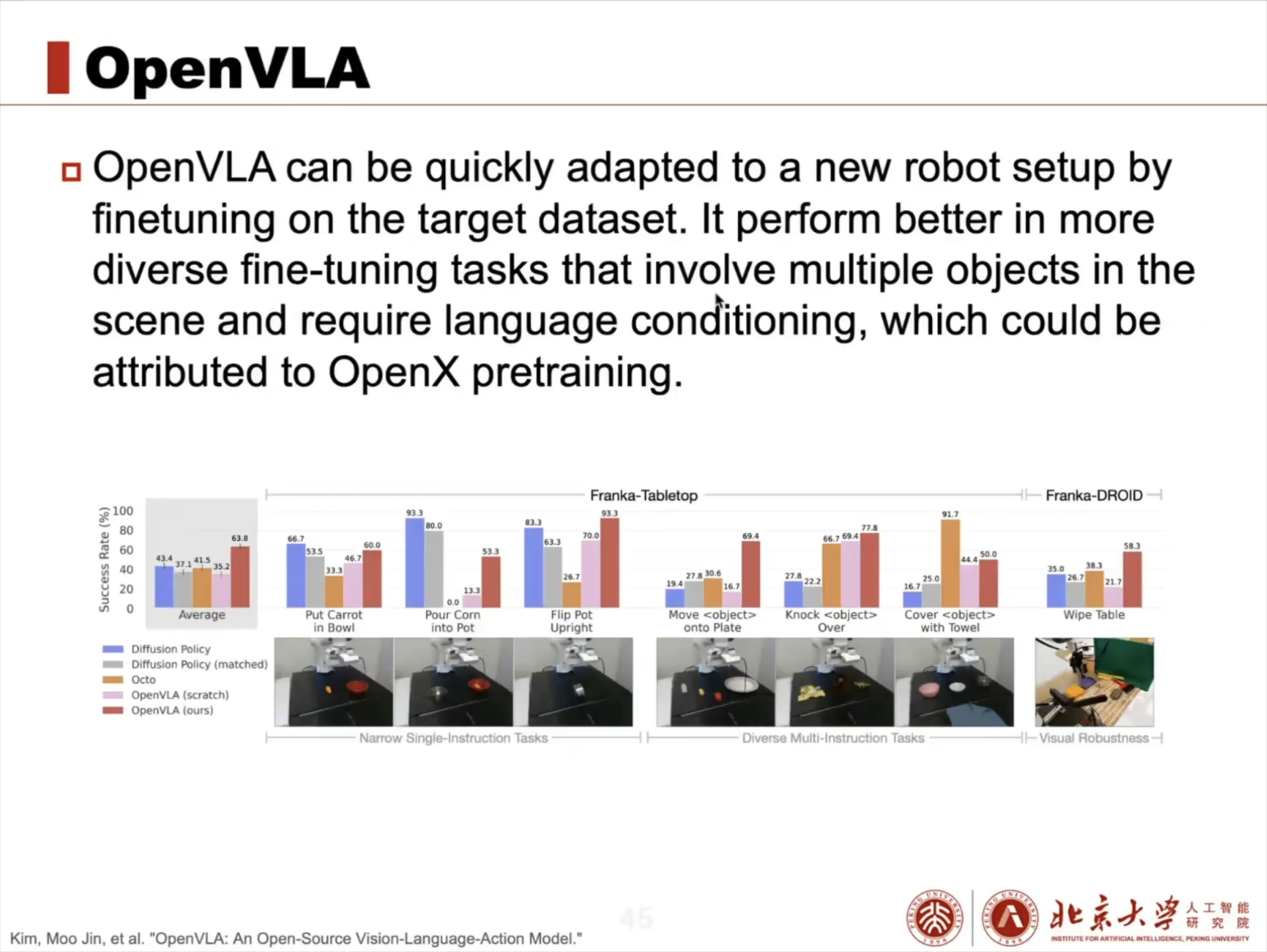
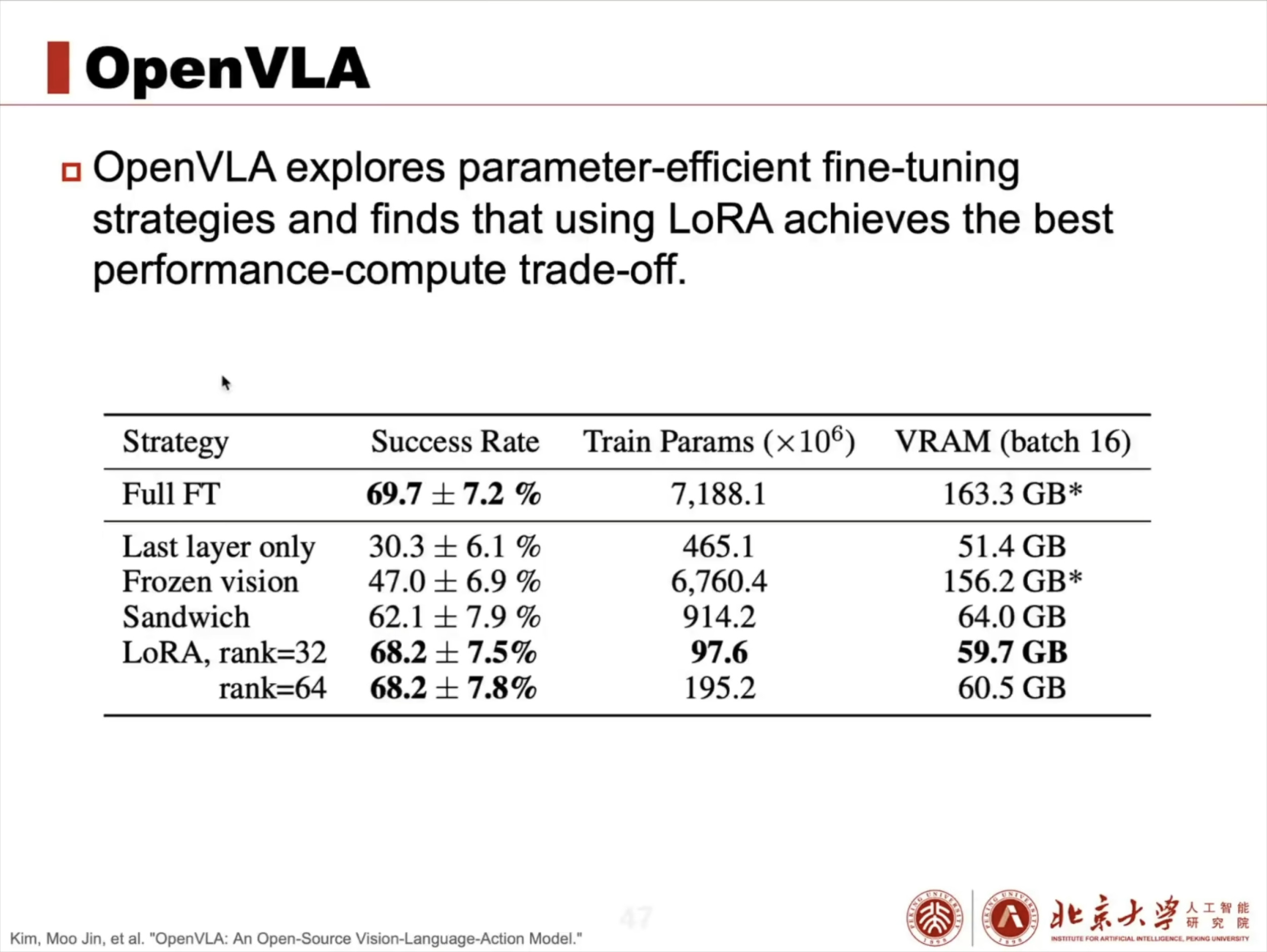
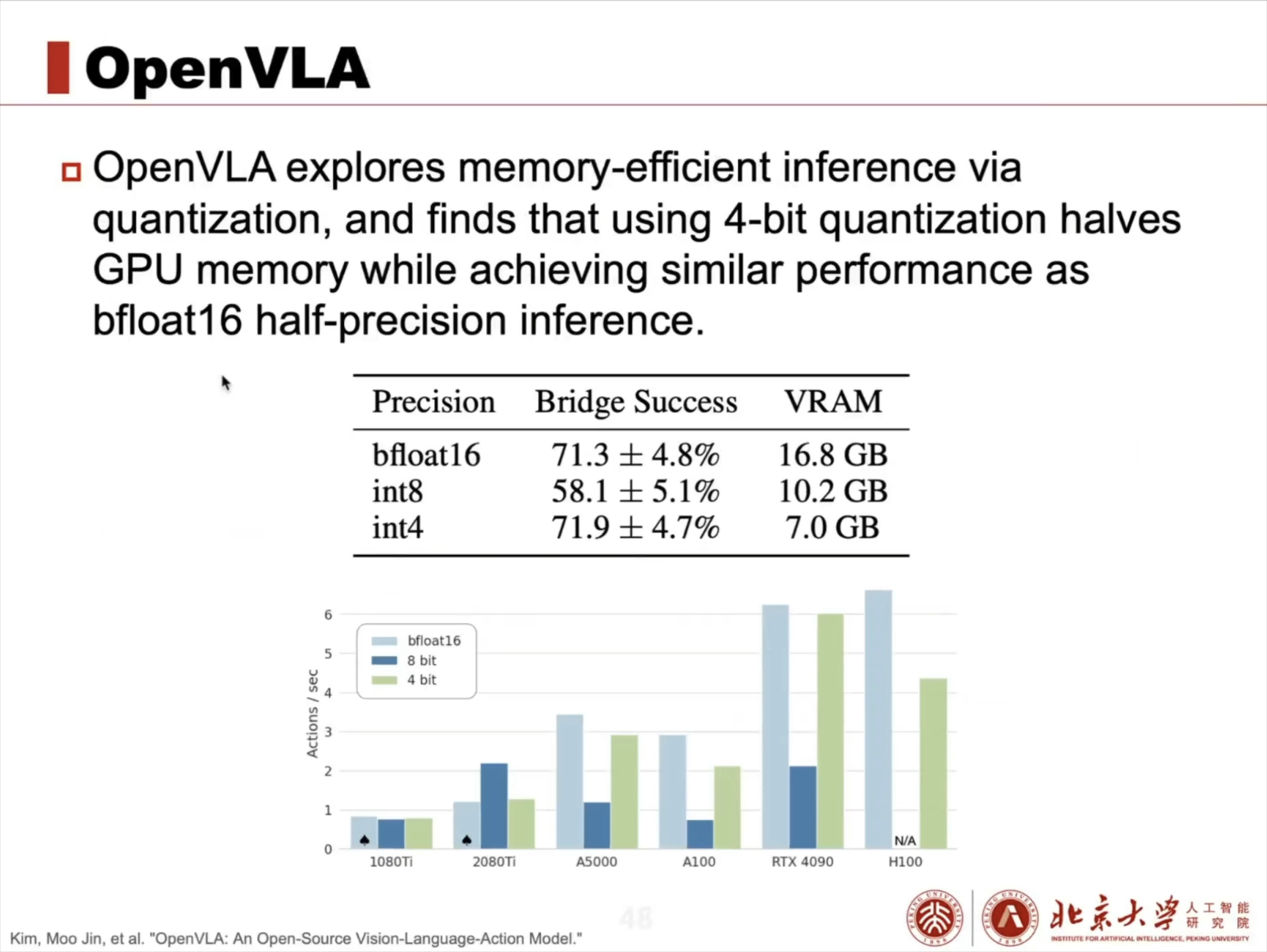
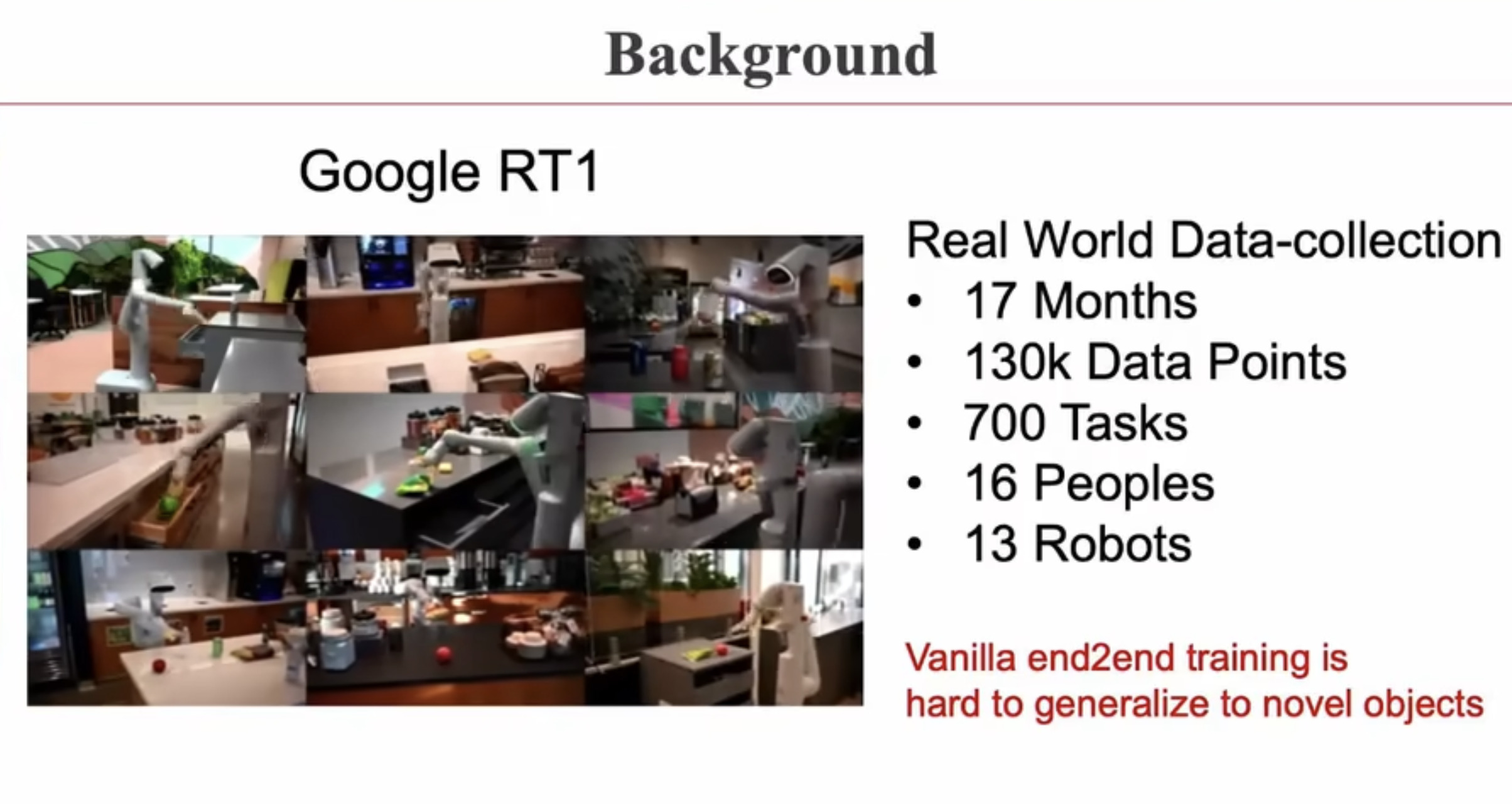
具身智能大模型简介 具身智能大模型简介 An introduction to robot manipulation Leveraging vision-language-action models for robot manipulation Takeaways, limitations, and future work 2025-05-11 10:00 · embodied-aivlavision-language-actionrobot-manipulationrt-1rt-2openvlapi0rdt具身智能