Reachy Mini Python SDK 开发实战:从运动控制到视觉音频交互
Notebook 0 — First Connection & Movement
🎯 目标:连接 Reachy Mini 并执行你的第一条运动指令。
Reachy Mini 采用客户端-服务器架构:
graph LR
subgraph Client
A[Your Python Script]
end
subgraph Server
B[Reachy Daemon]
end
subgraph Reachy Mini
C[Robot Hardware or Simulation]
end
A <--> B
B --> C
- 守护程序(Daemon):一个后台服务程序,直接控制机器人的电机、传感器、摄像头和音频。
- Python SDK:你用来发送指令的
reachy_mini软件包。
- 多个客户端可以同时连接(如网页应用、脚本、Jupyter Notebook)。
- 守护程序负责安全地处理底层硬件操作。
- 你可以通过网络远程控制机器人。例如,在与机器人连接的树莓派(Raspberry Pi)上运行守护程序,同时在性能强大的服务器上运行你的 AI 代码。
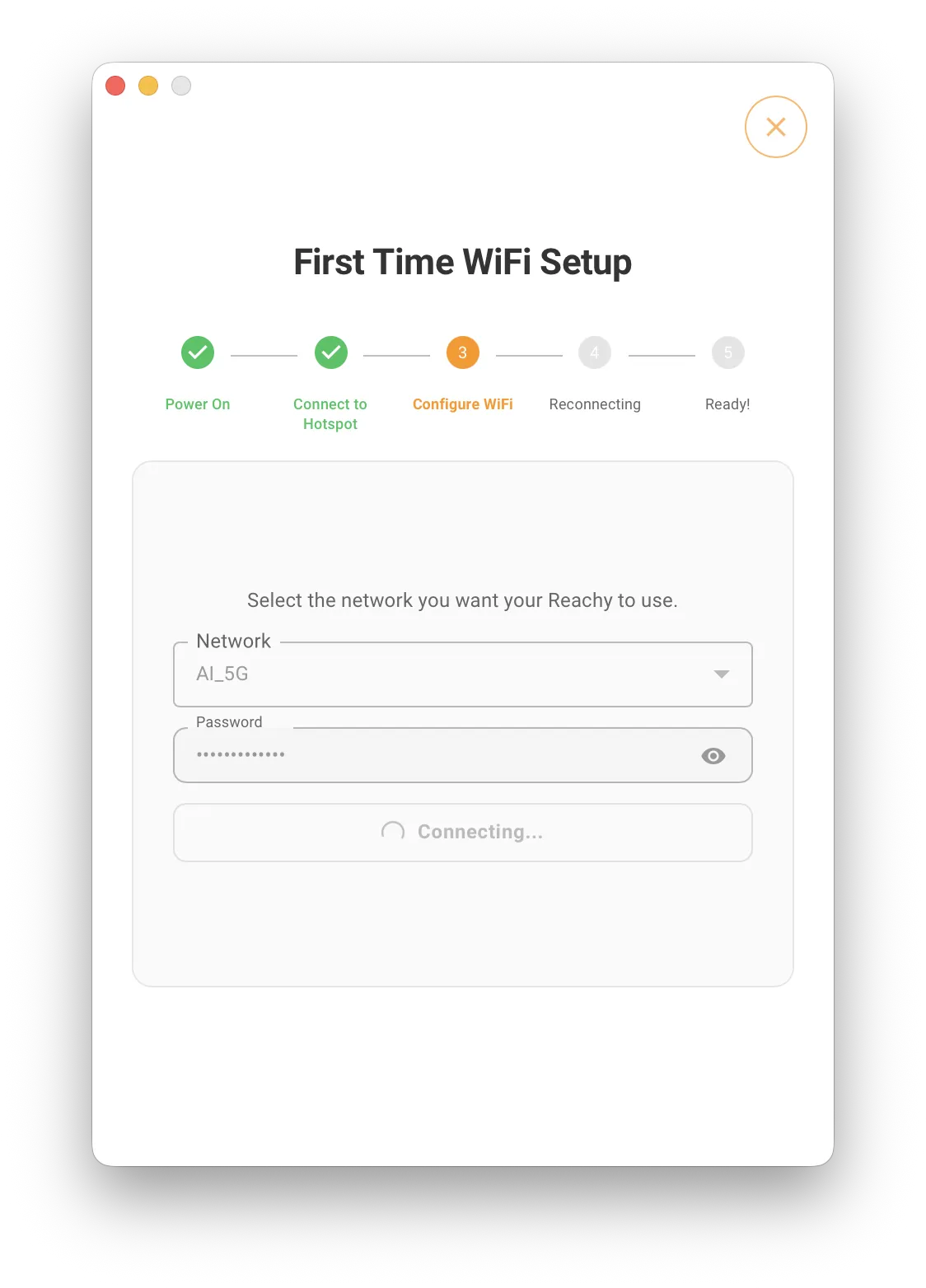
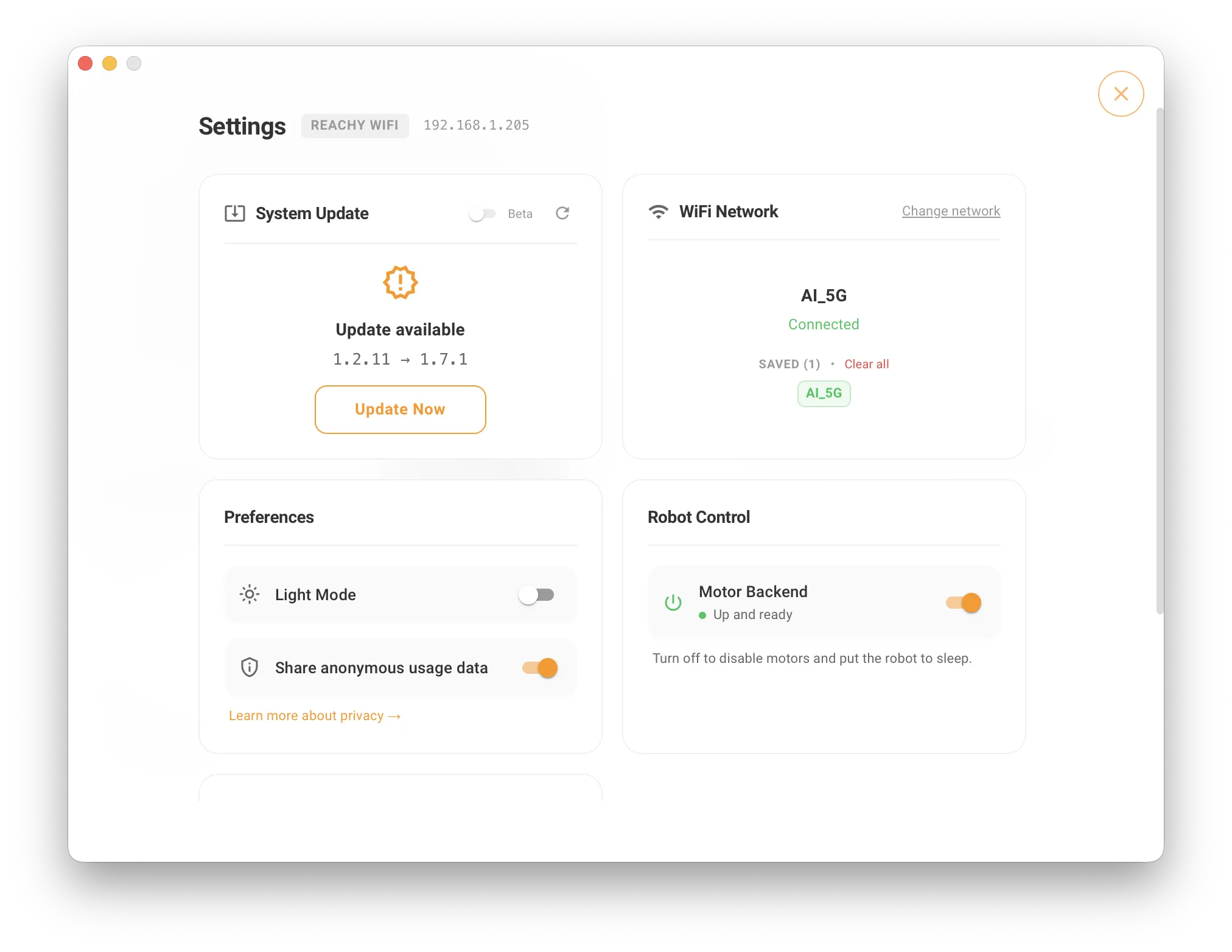
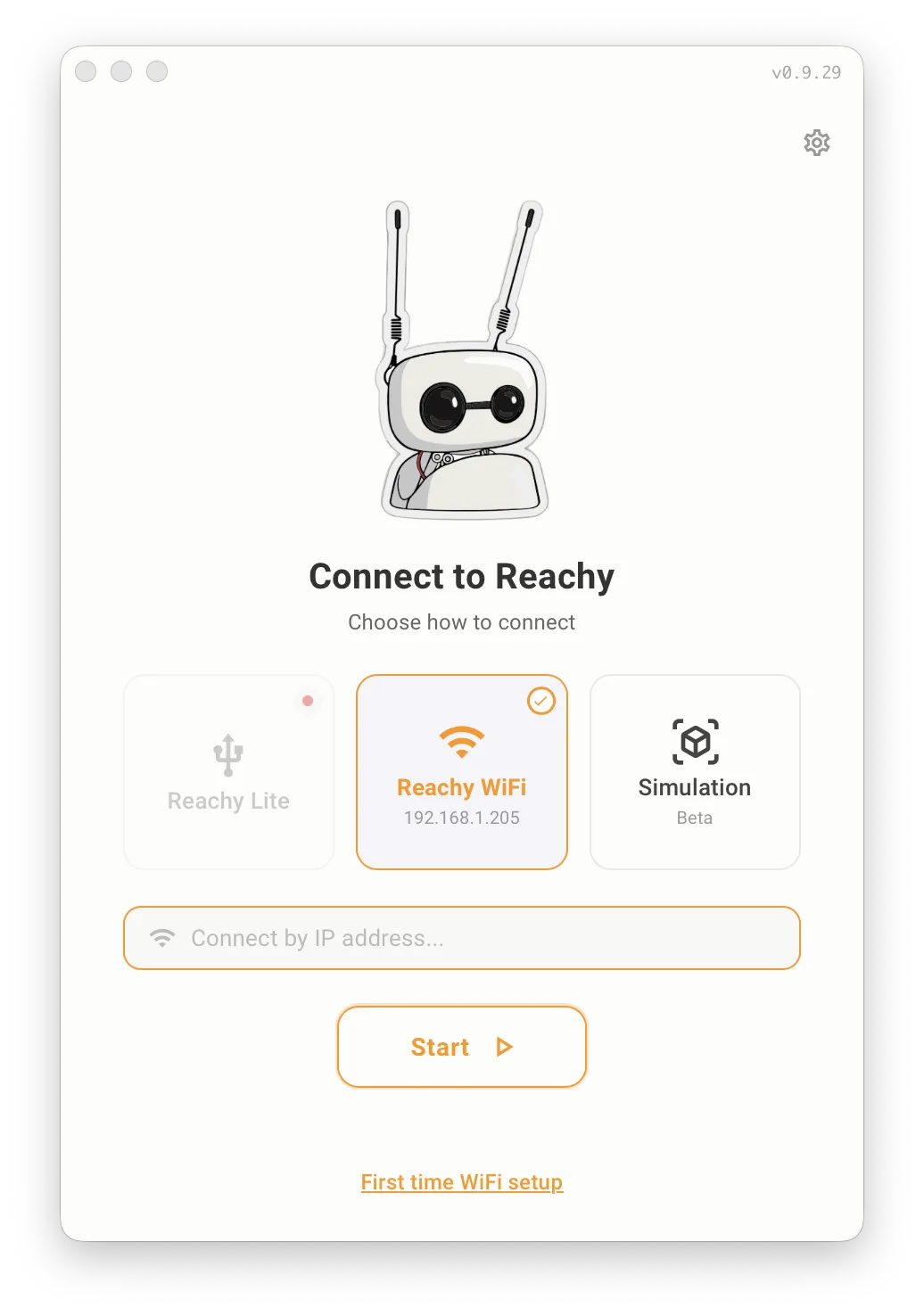
在运行代码之前,请先确认机器人已启动并正常运行。
你应该使用 Reachy Mini Control 来检查机器人是否已连接并准备就绪。