跨本体具身大小脑协作框架 RoboOS
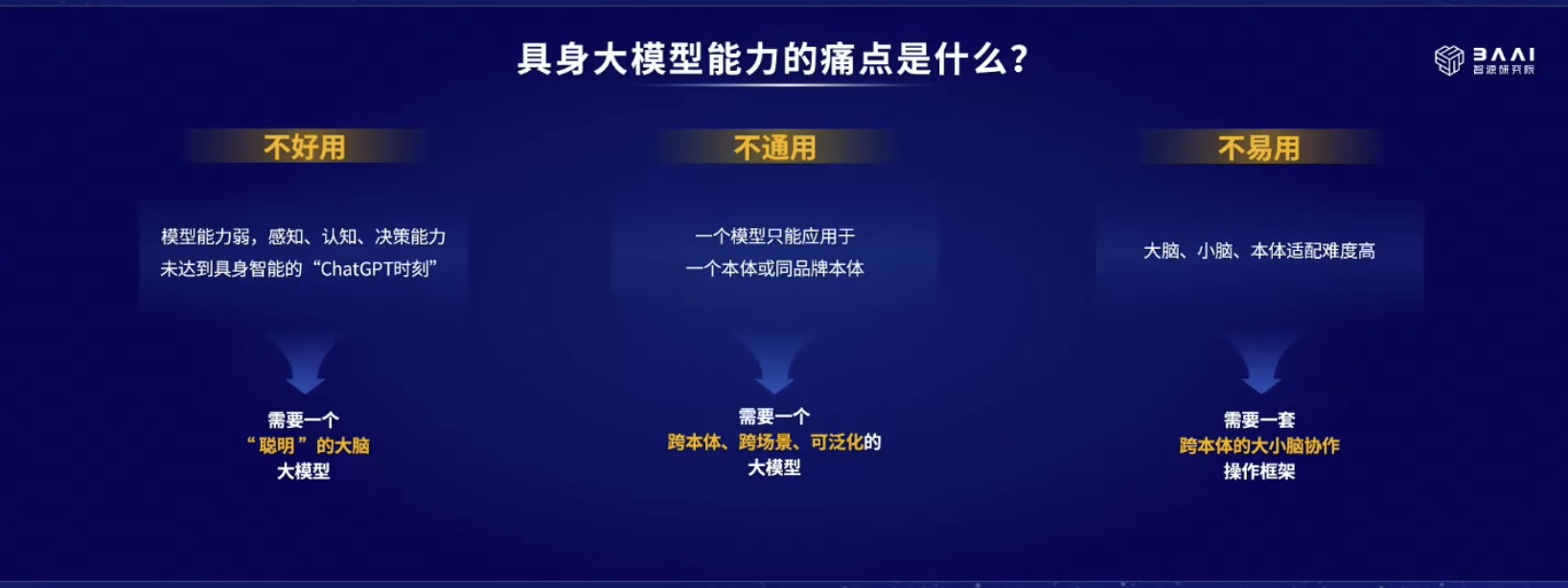
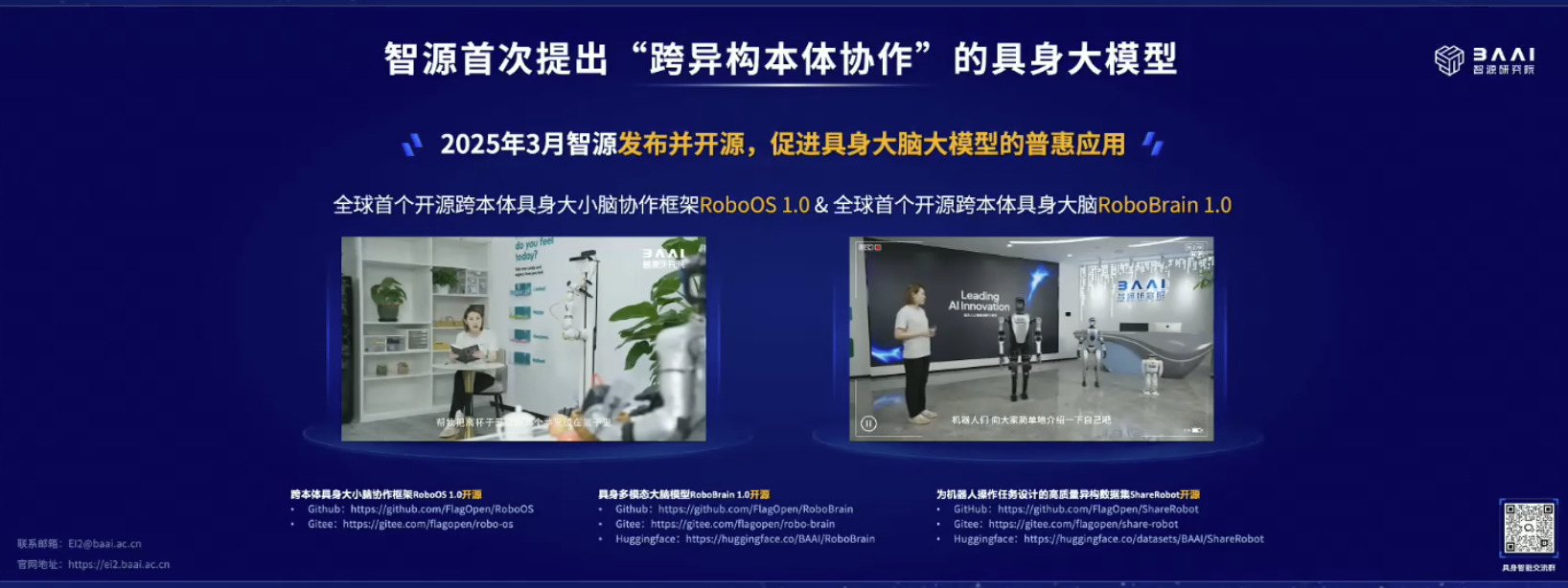
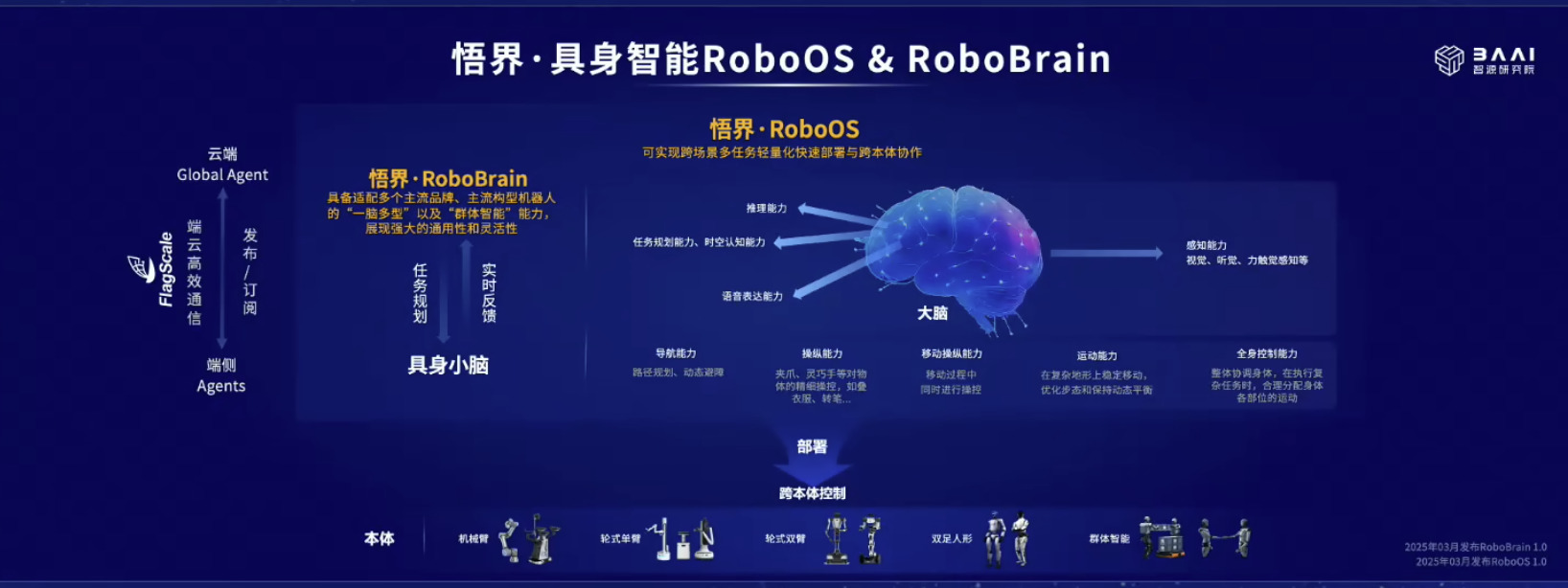
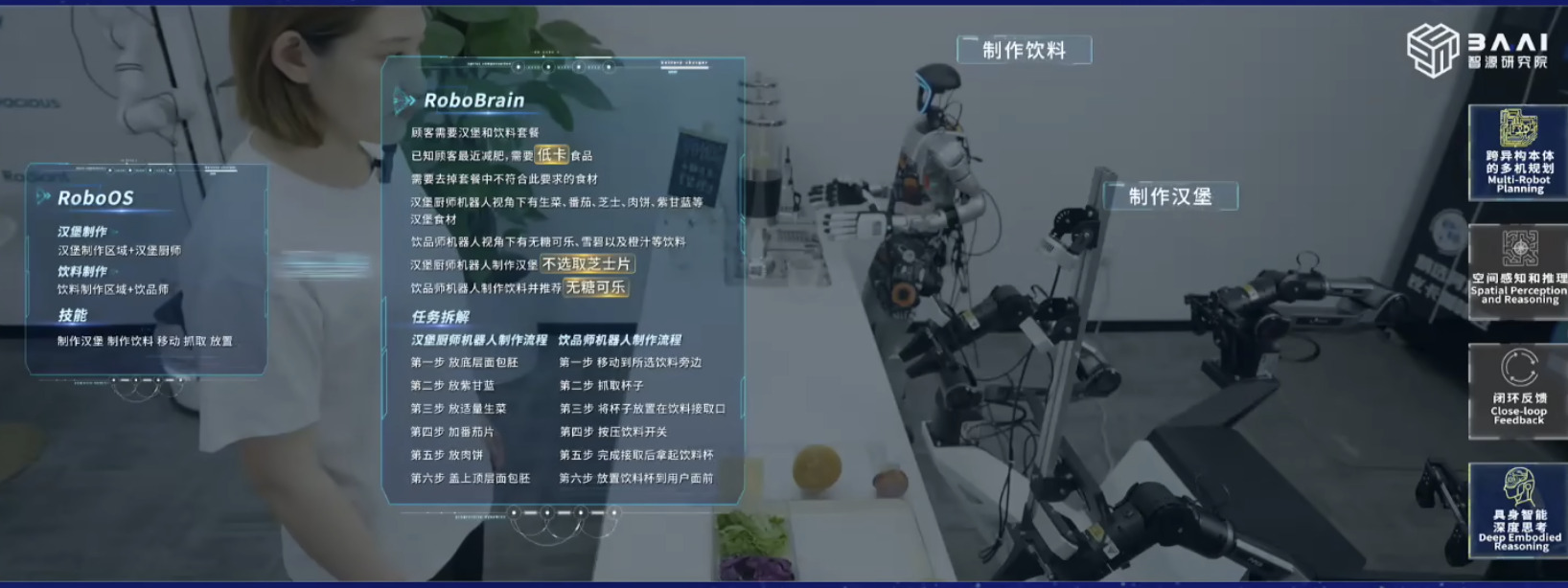
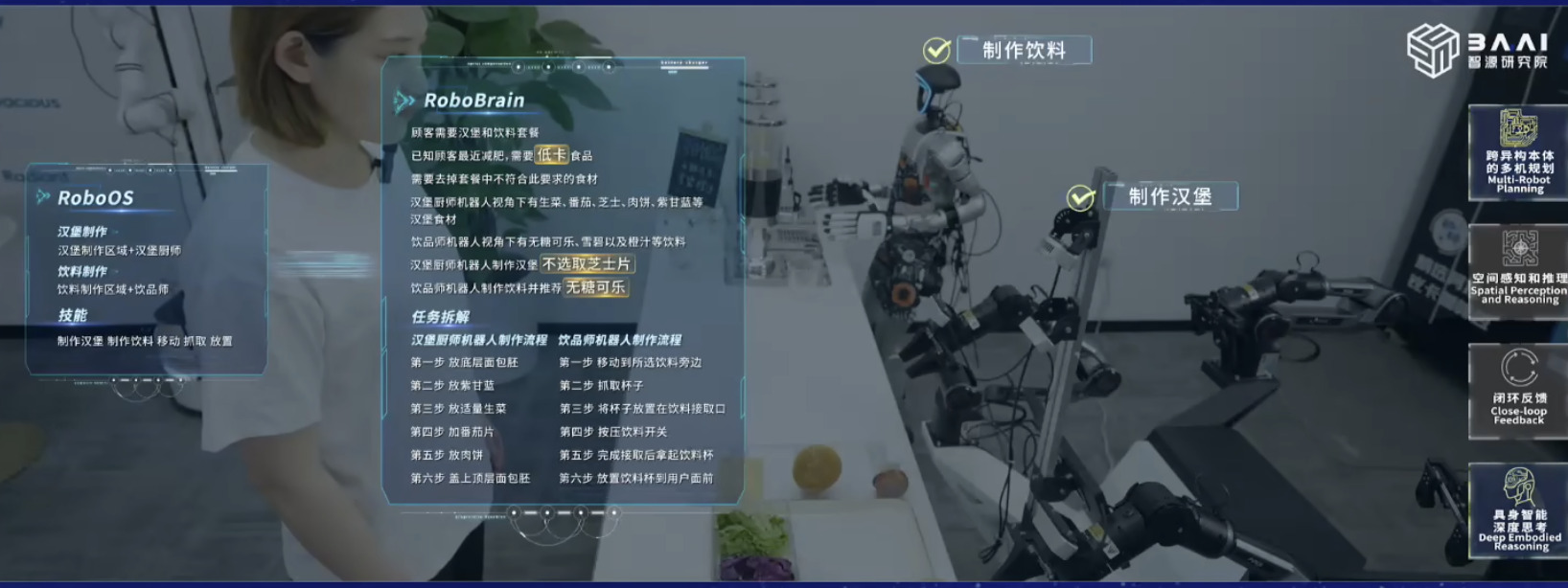
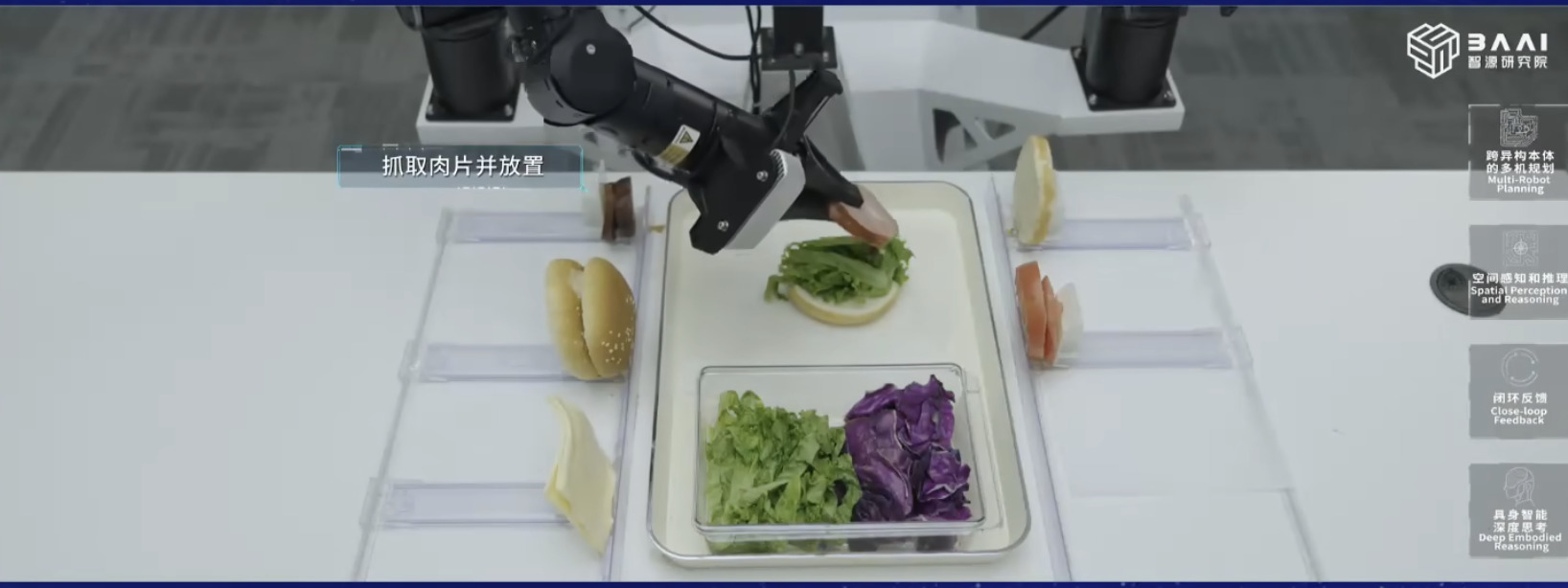
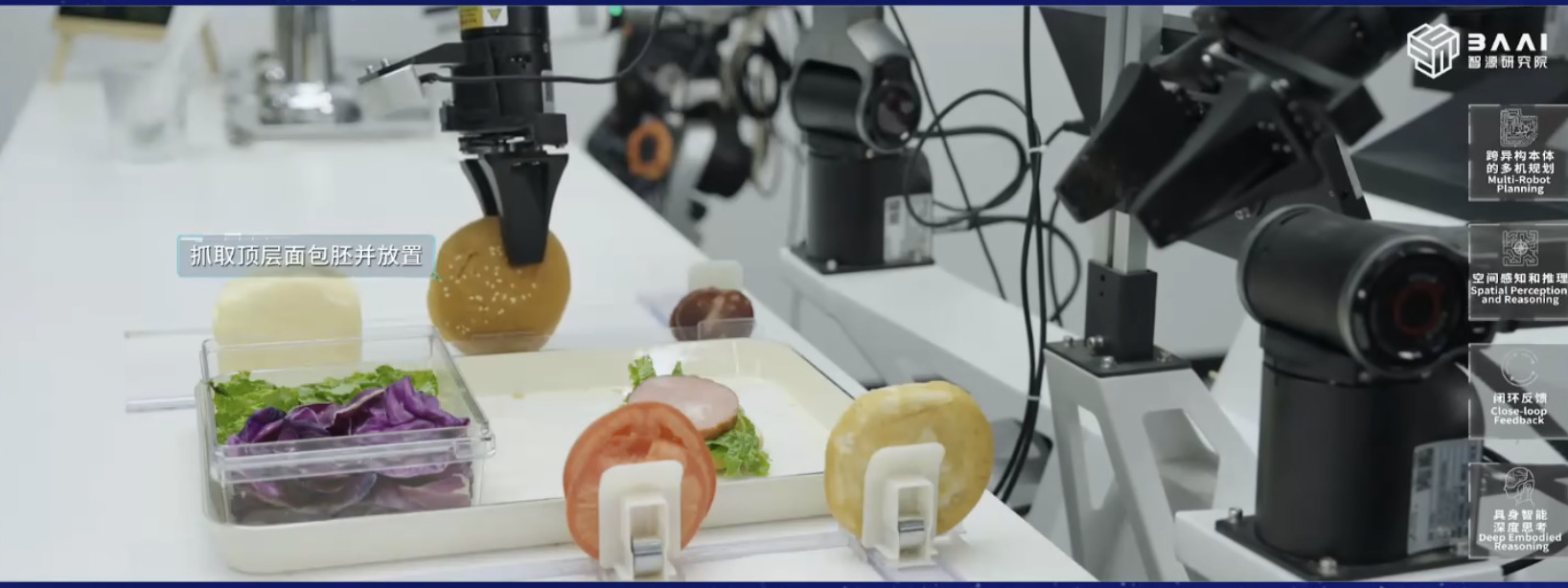
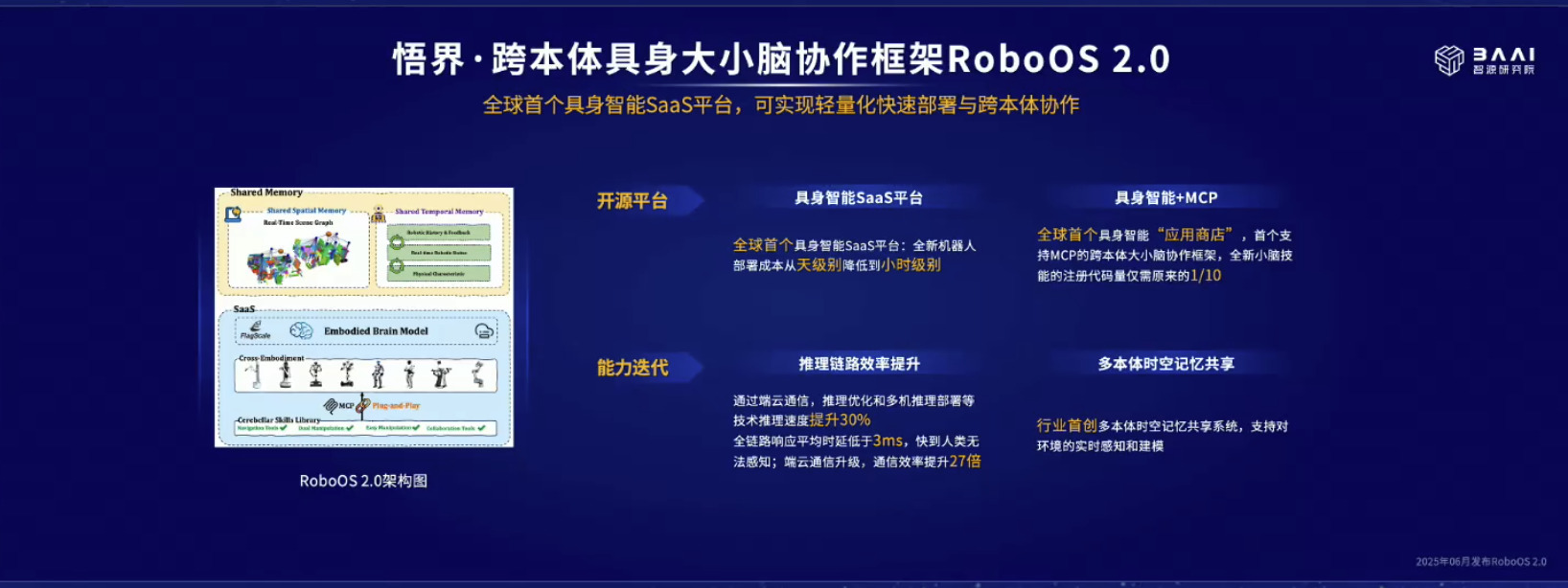
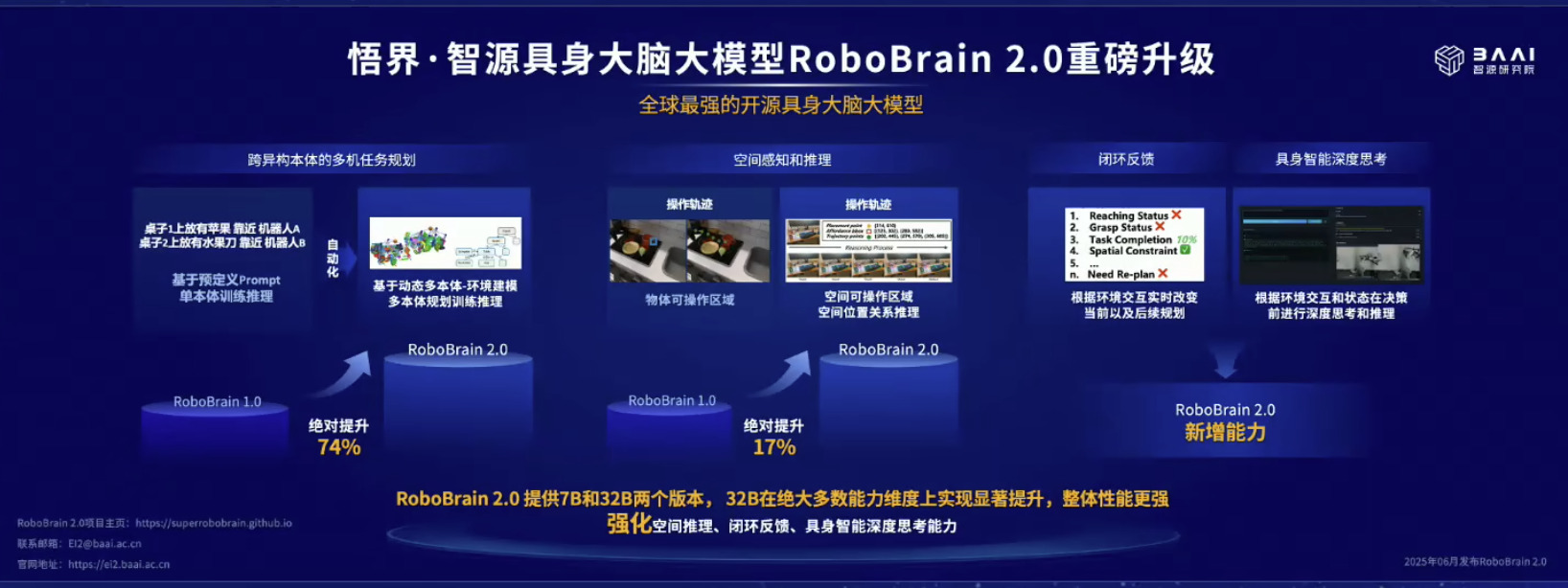
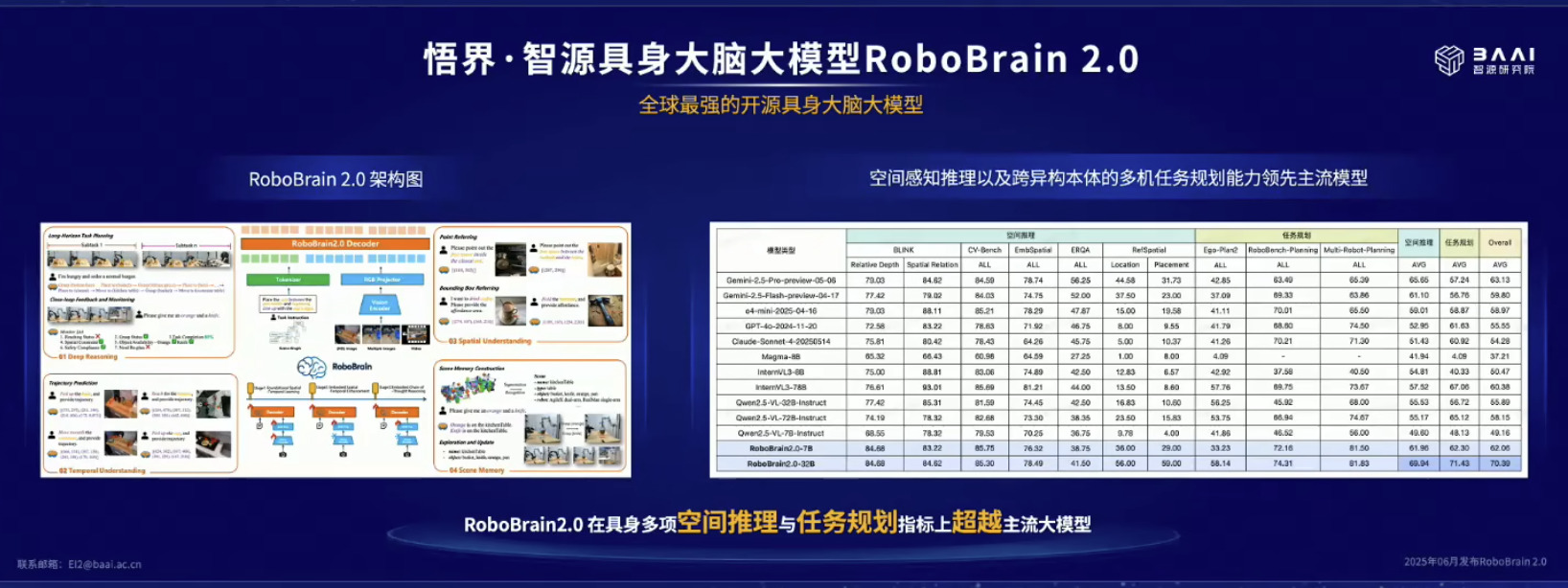
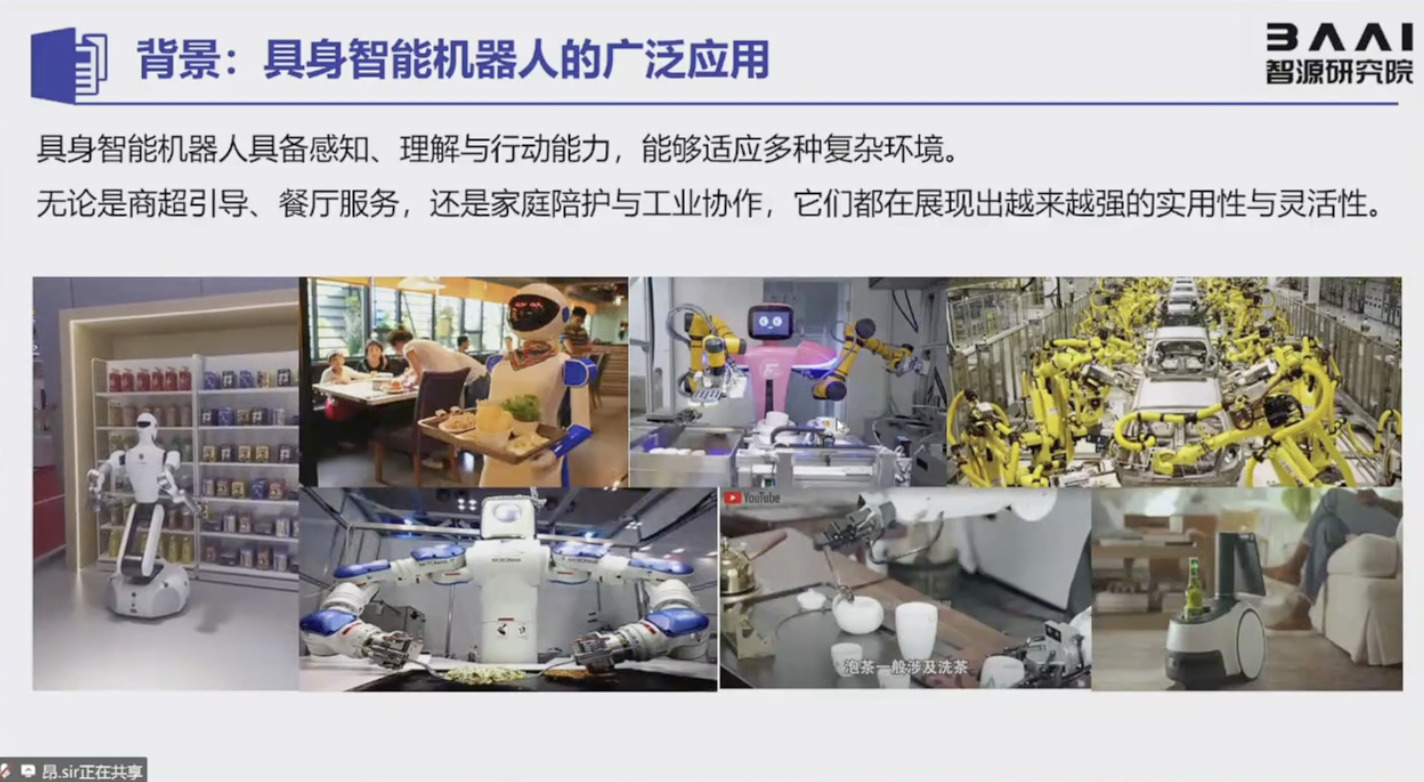
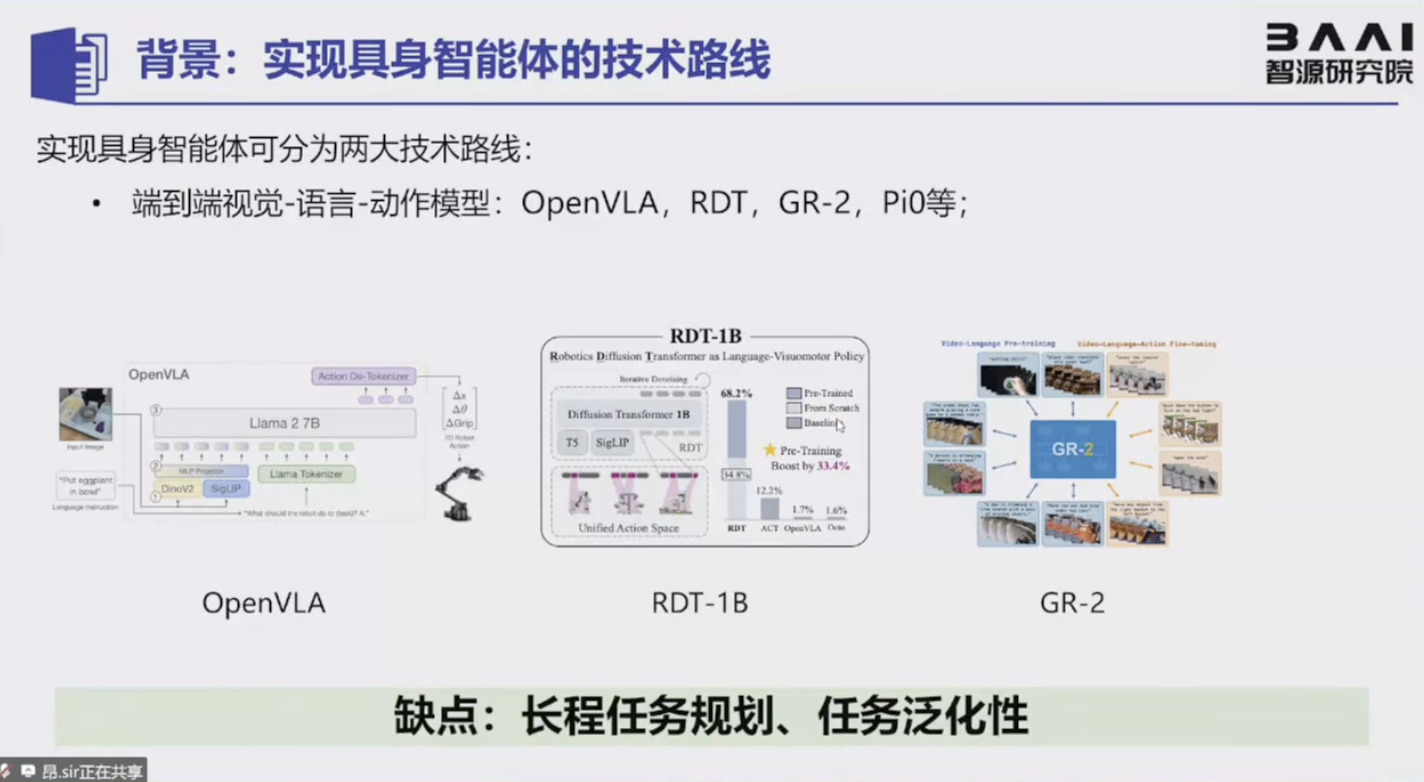
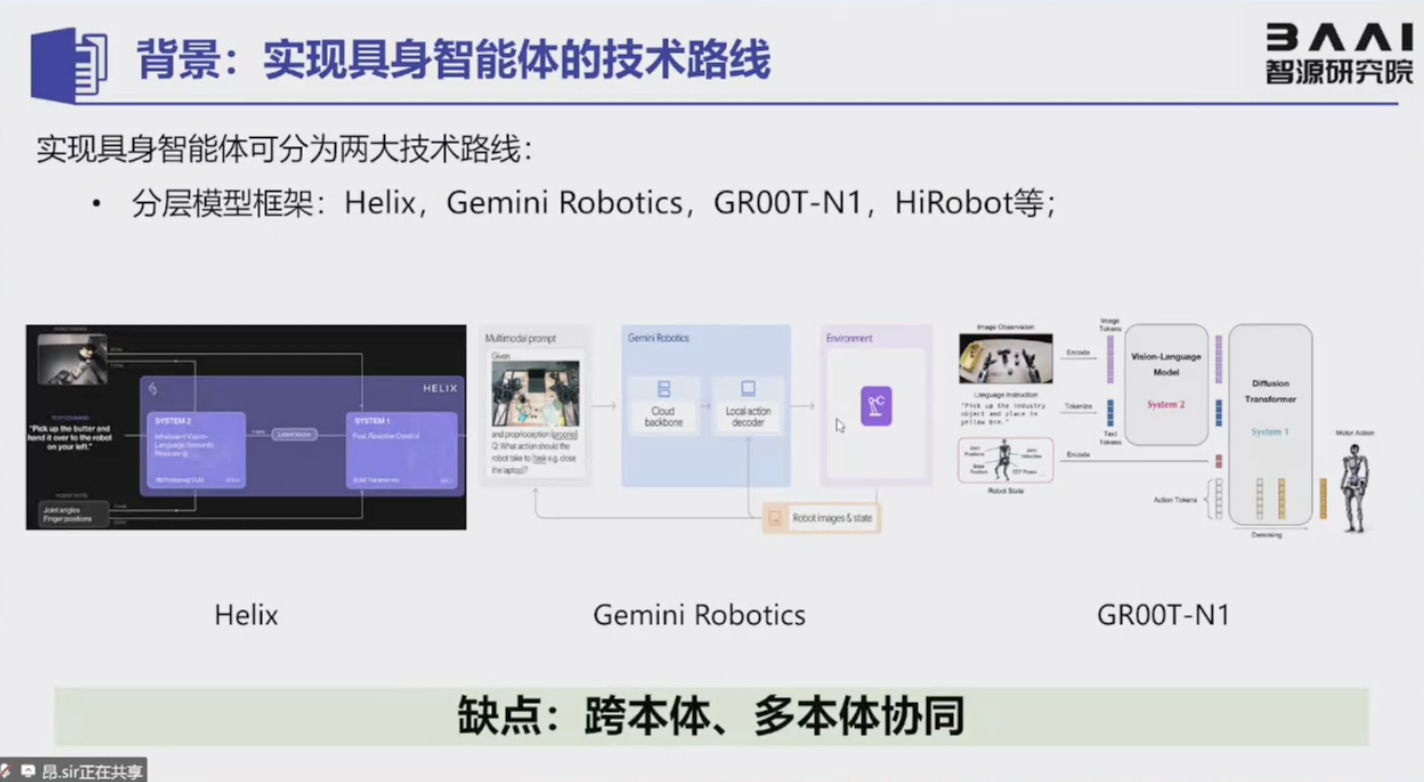
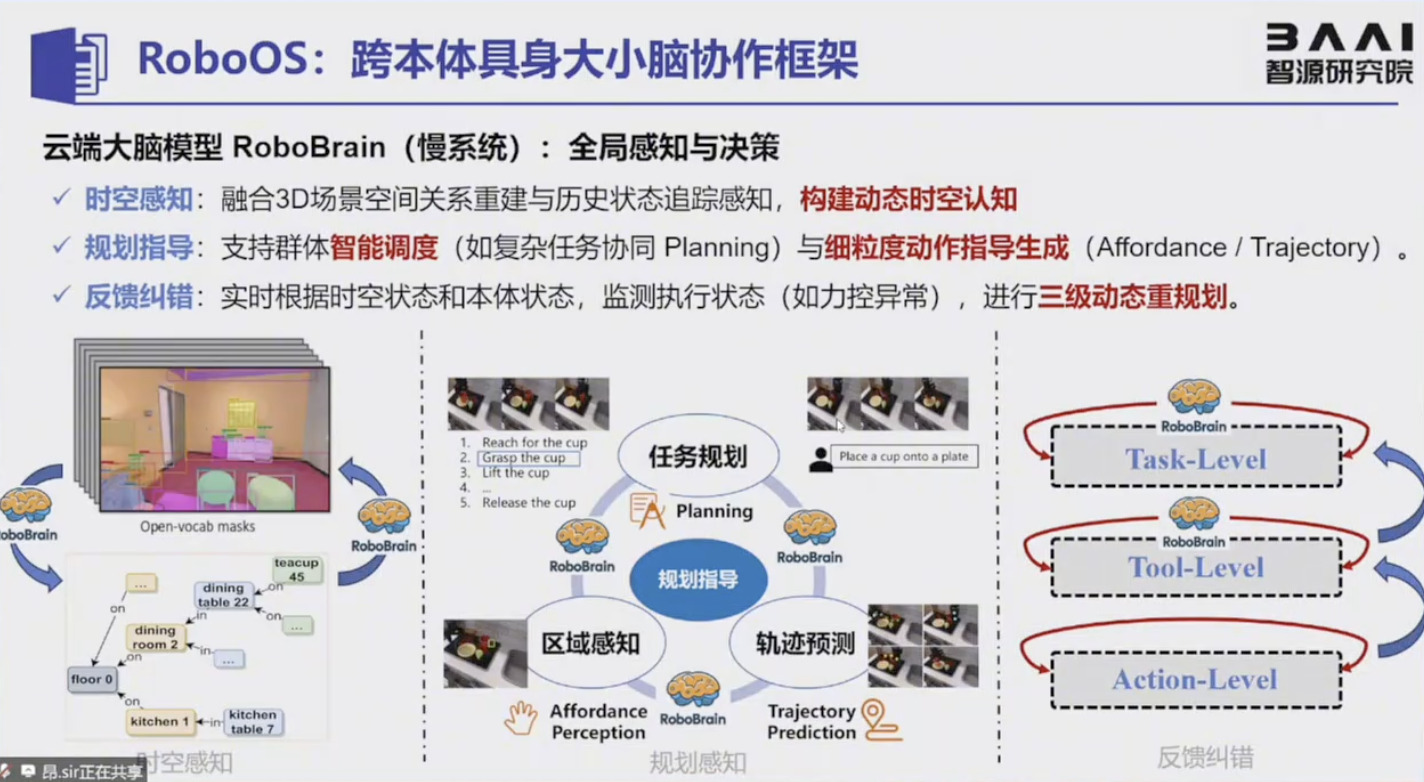
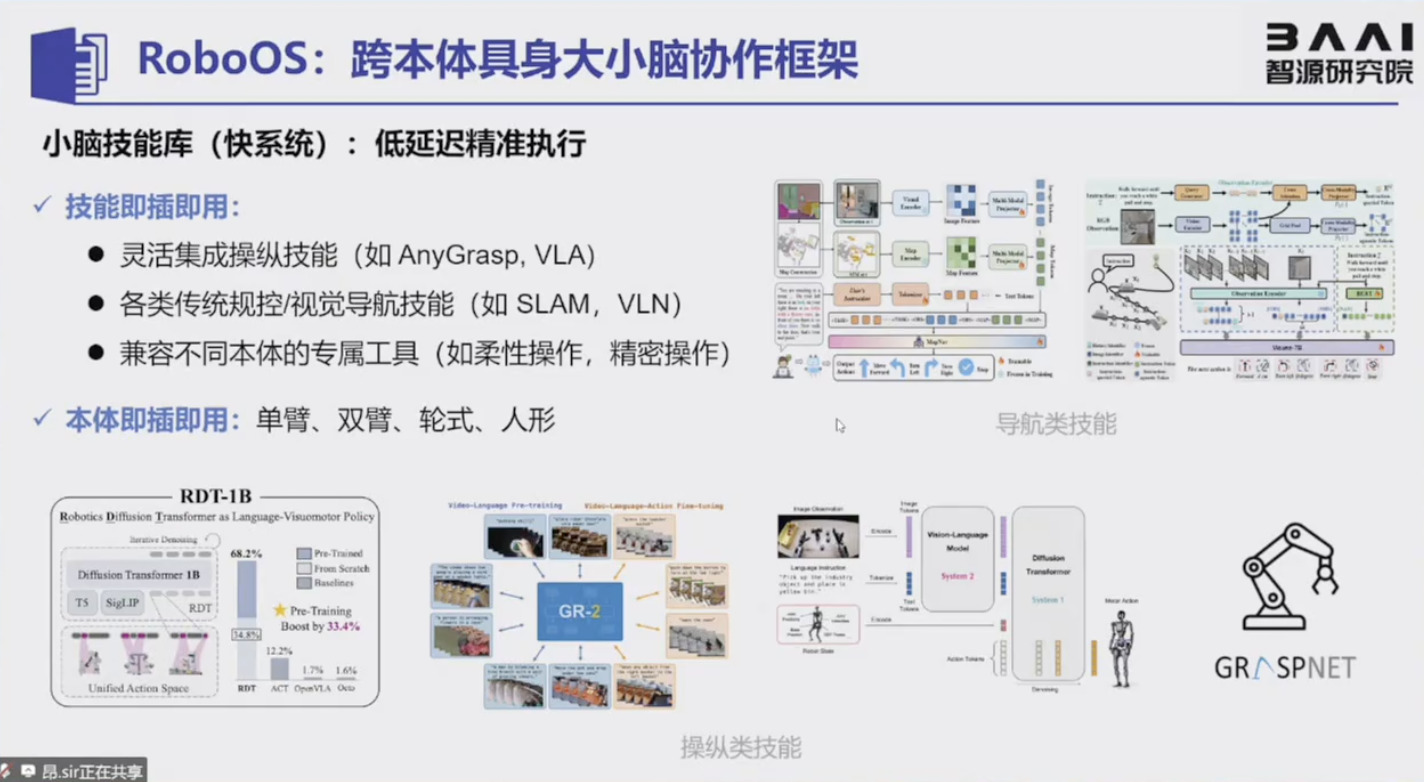
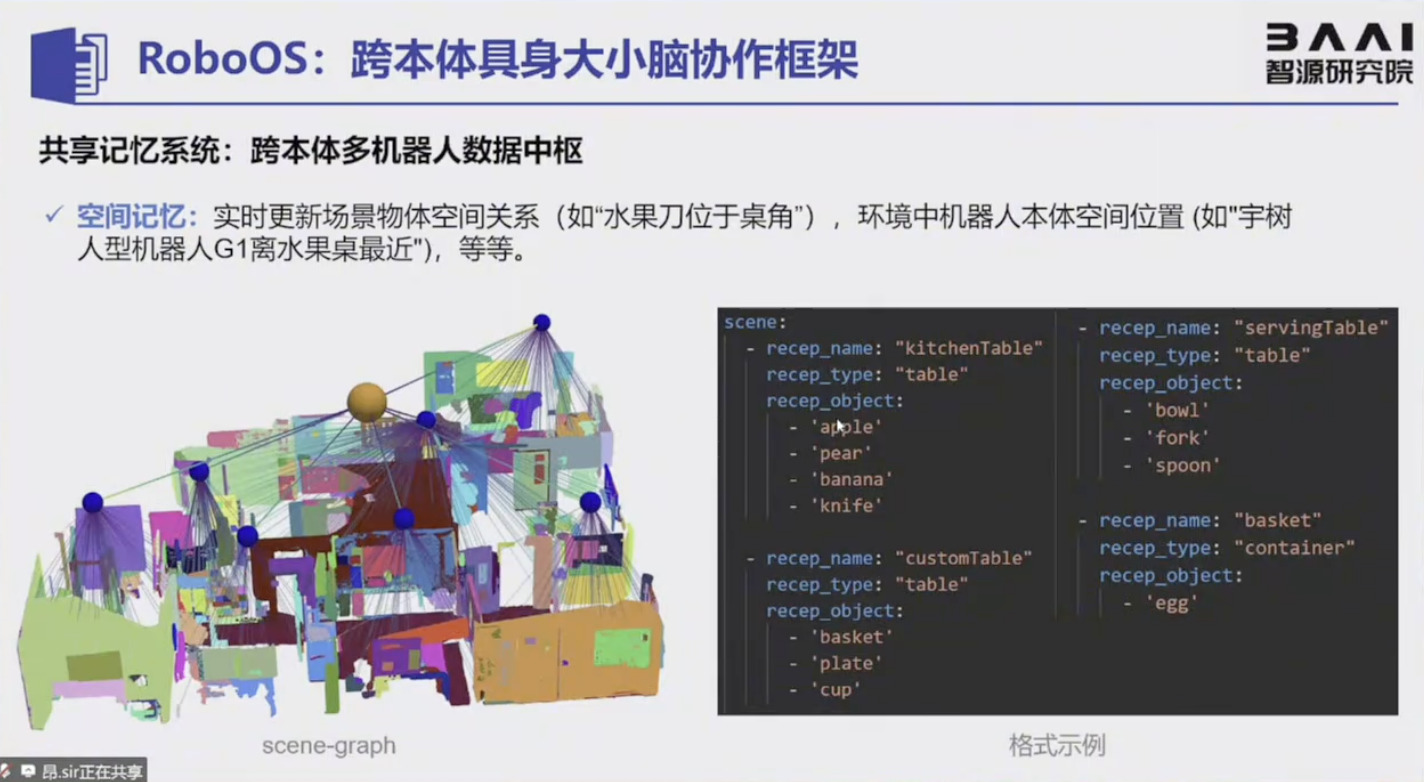
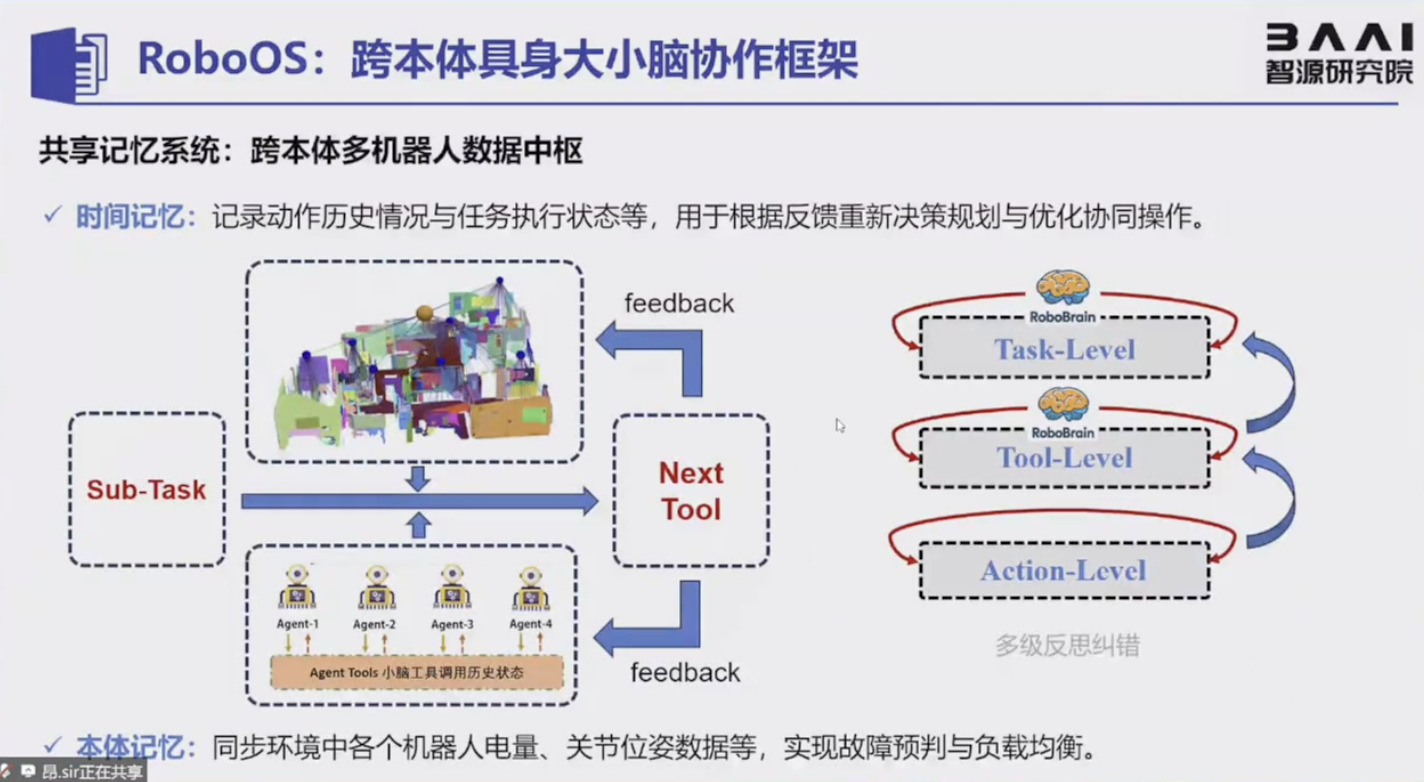
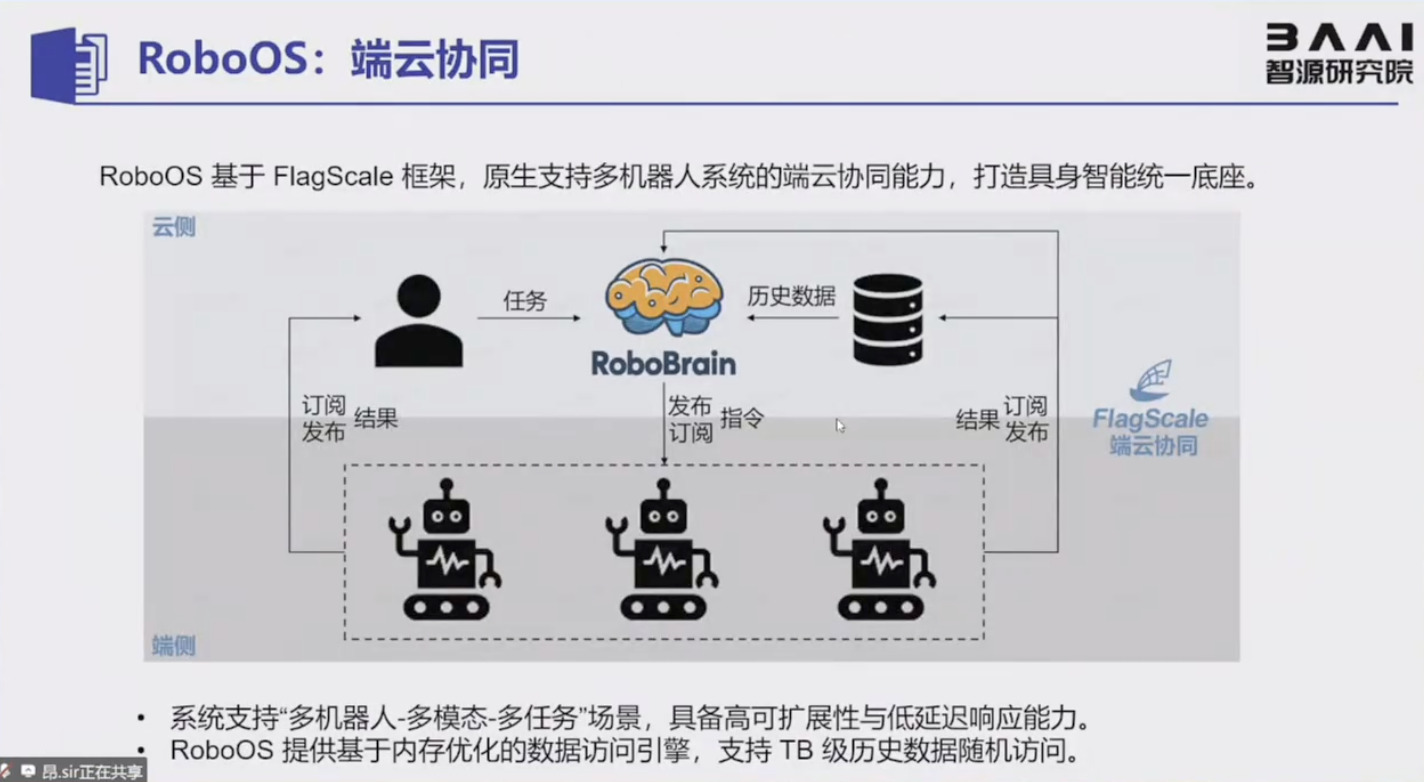
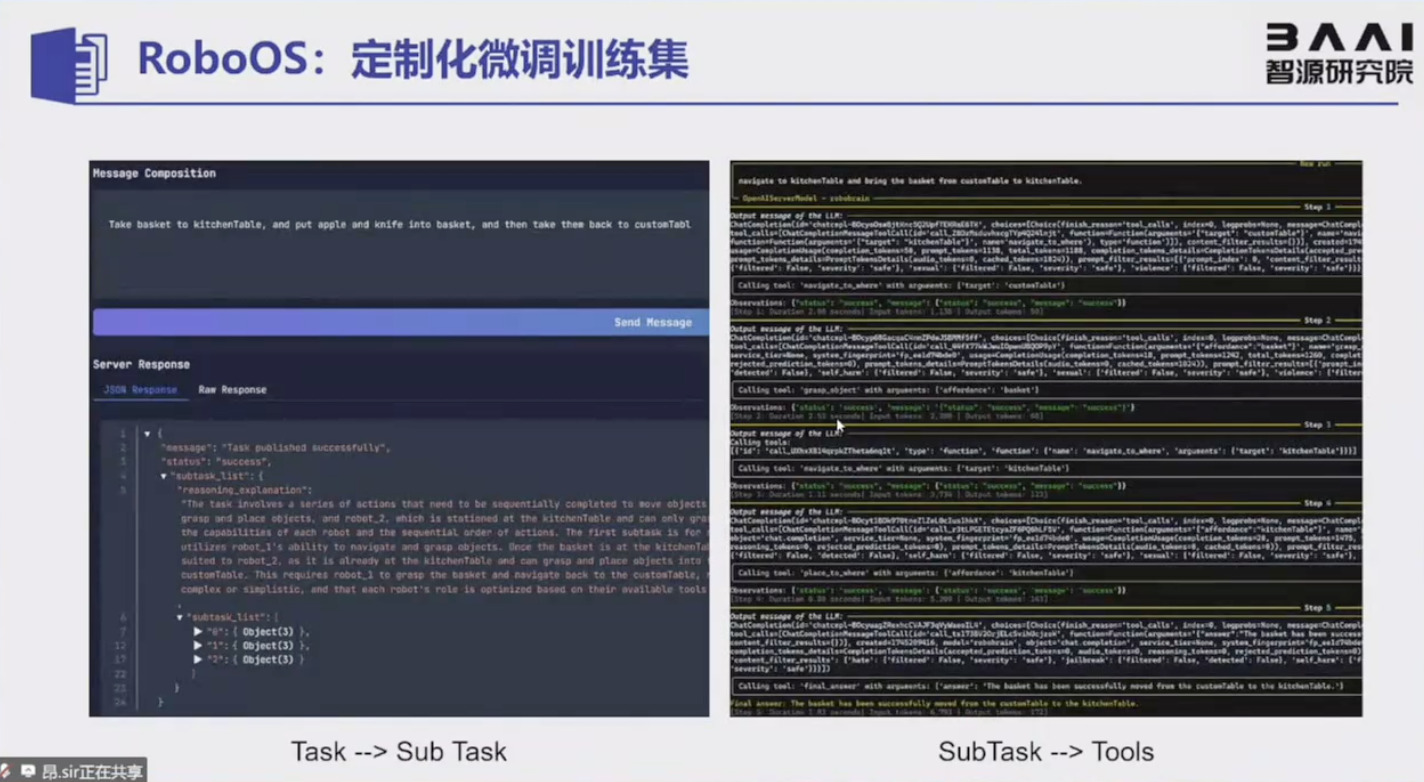
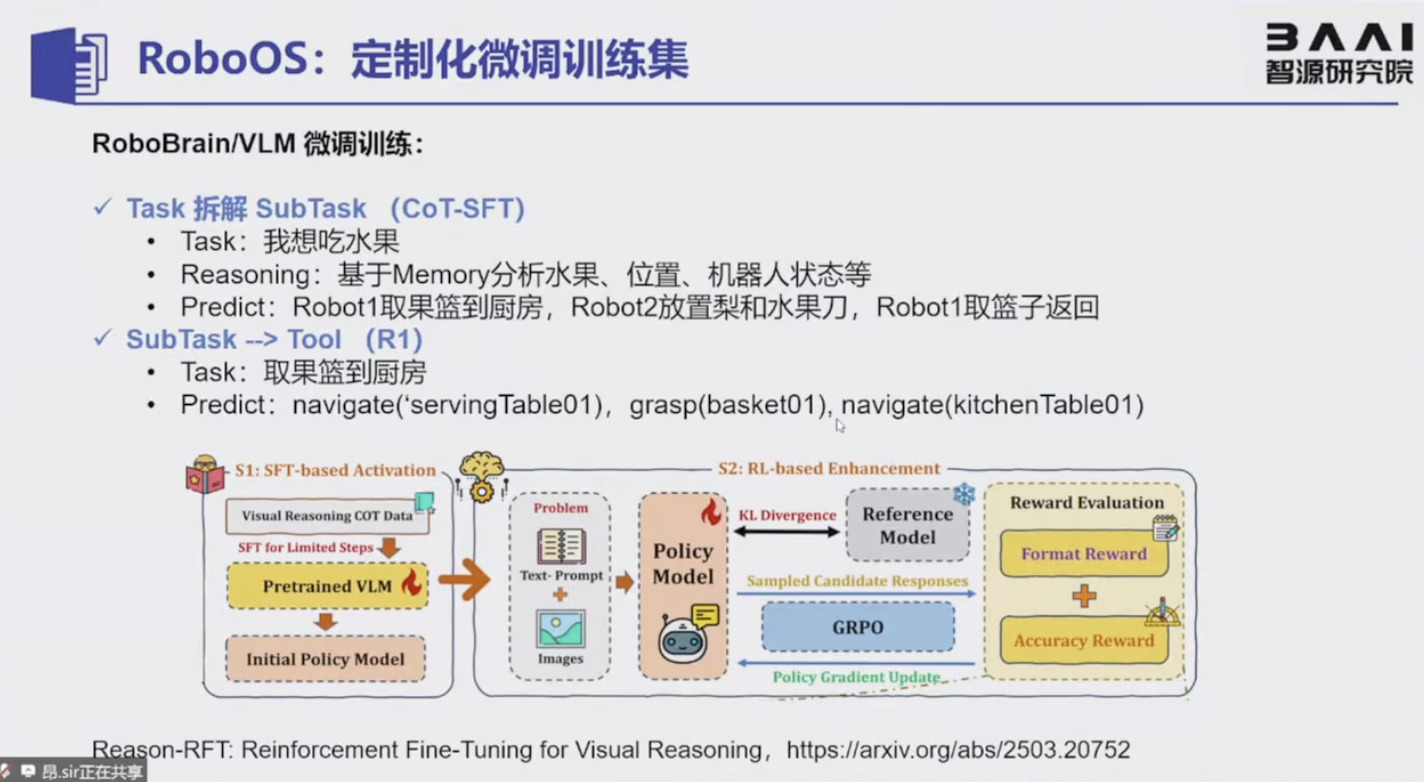
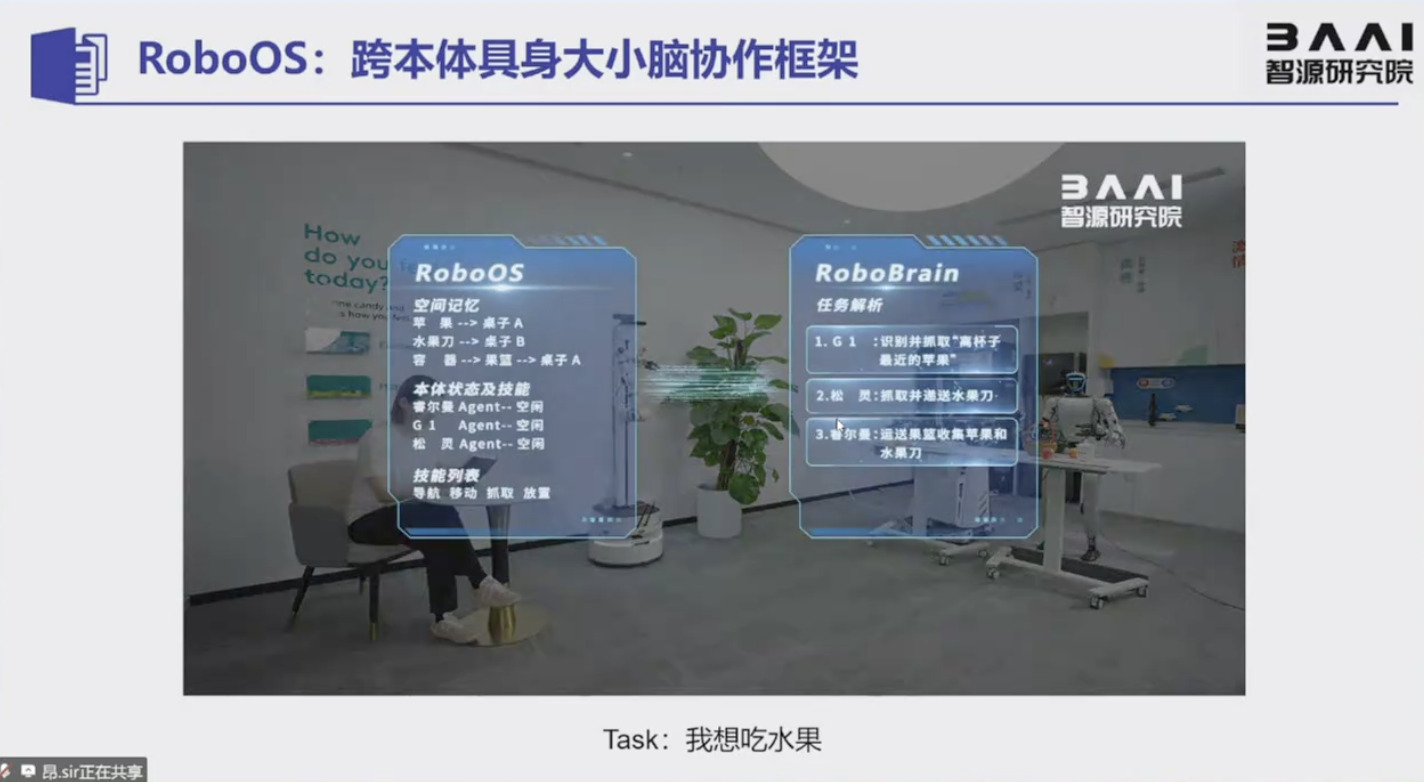
本文档介绍了 RoboOS,一个用于跨本体具身大小脑协作的框架。它首先概述了具身智能体的现有技术路线及其局限性,例如:在长程任务规划和跨本体协作方面的不足。该框架通过 “具身大脑”(负责全局感知与决策)和 “具身小脑”(提供即插即用的技能库)实现多本体协作控制。文档还重点说明了共享记忆系统在空间和时间维度上的数据中心化,以及云端协同如何支持多机器人、多任务场景,并展示了自定义微调集以提高任务分解和执行的准确性。
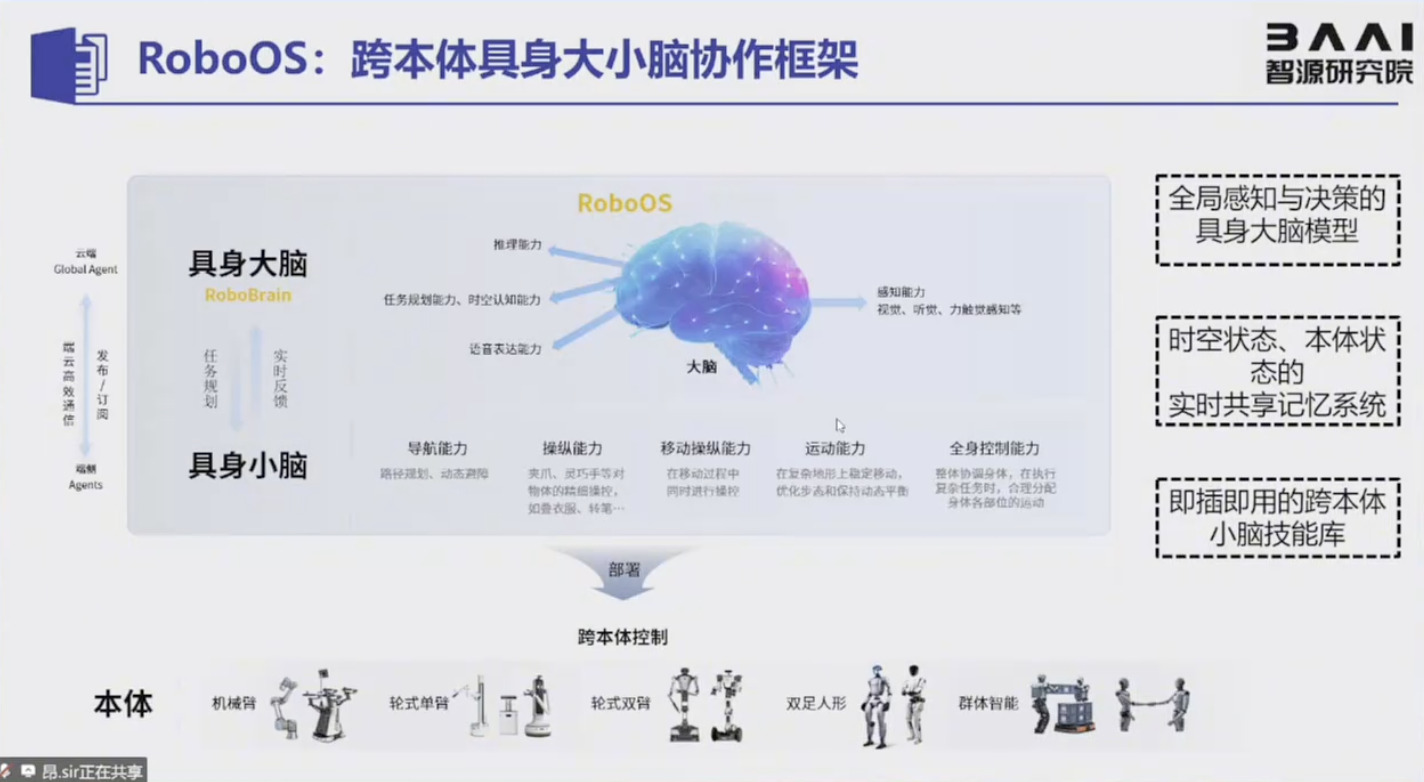
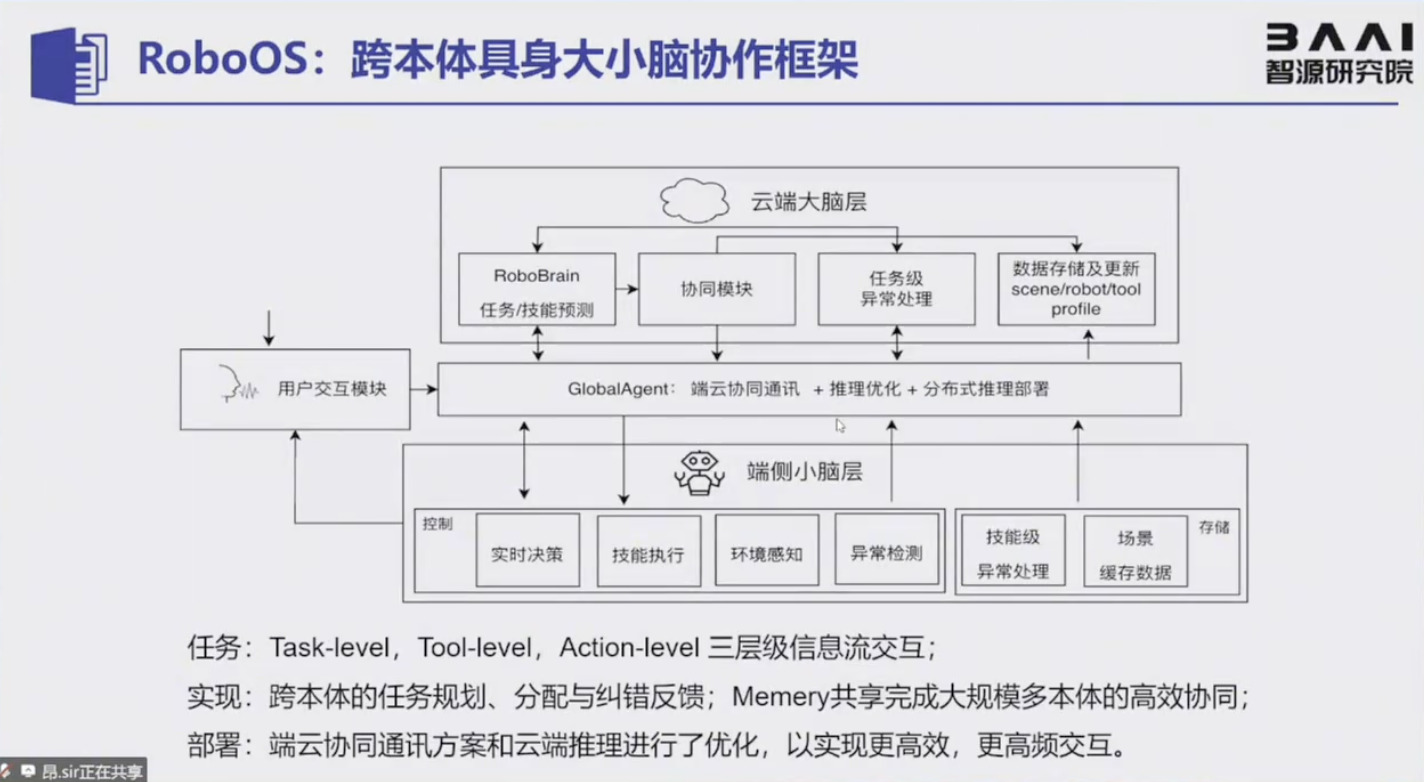



本文档介绍了 RoboOS,一个用于跨本体具身大小脑协作的框架。它首先概述了具身智能体的现有技术路线及其局限性,例如:在长程任务规划和跨本体协作方面的不足。该框架通过 “具身大脑”(负责全局感知与决策)和 “具身小脑”(提供即插即用的技能库)实现多本体协作控制。文档还重点说明了共享记忆系统在空间和时间维度上的数据中心化,以及云端协同如何支持多机器人、多任务场景,并展示了自定义微调集以提高任务分解和执行的准确性。
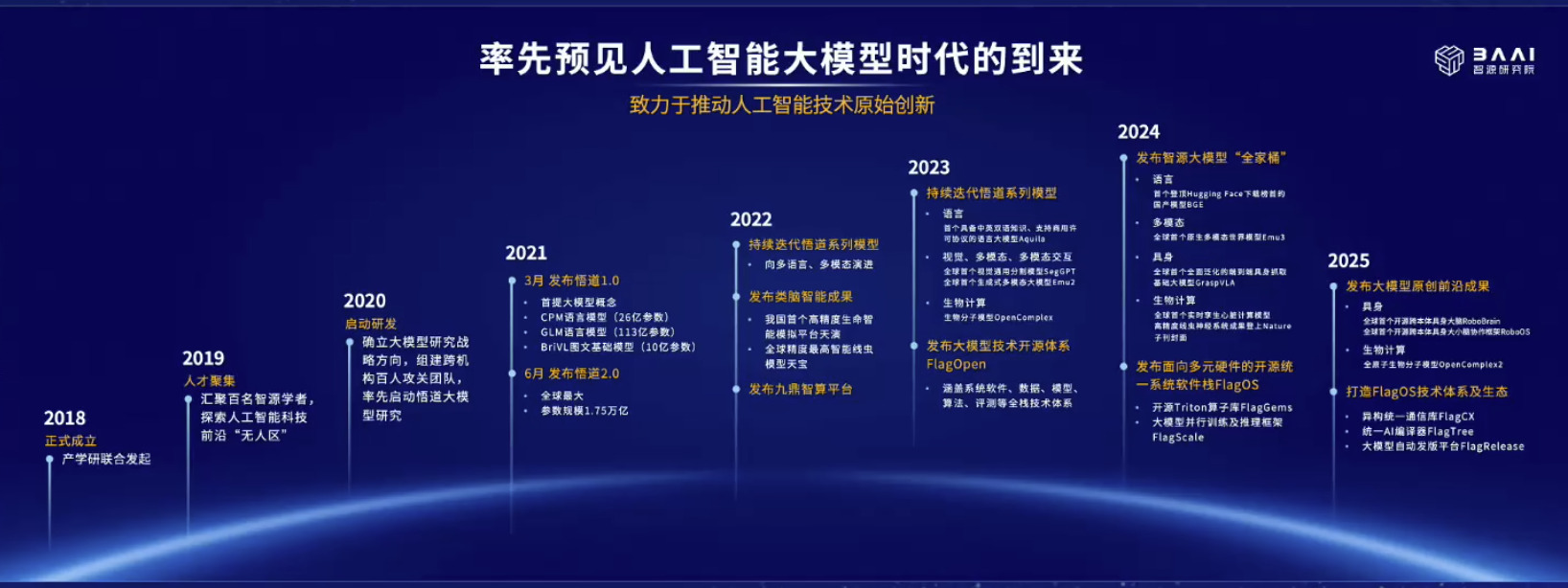
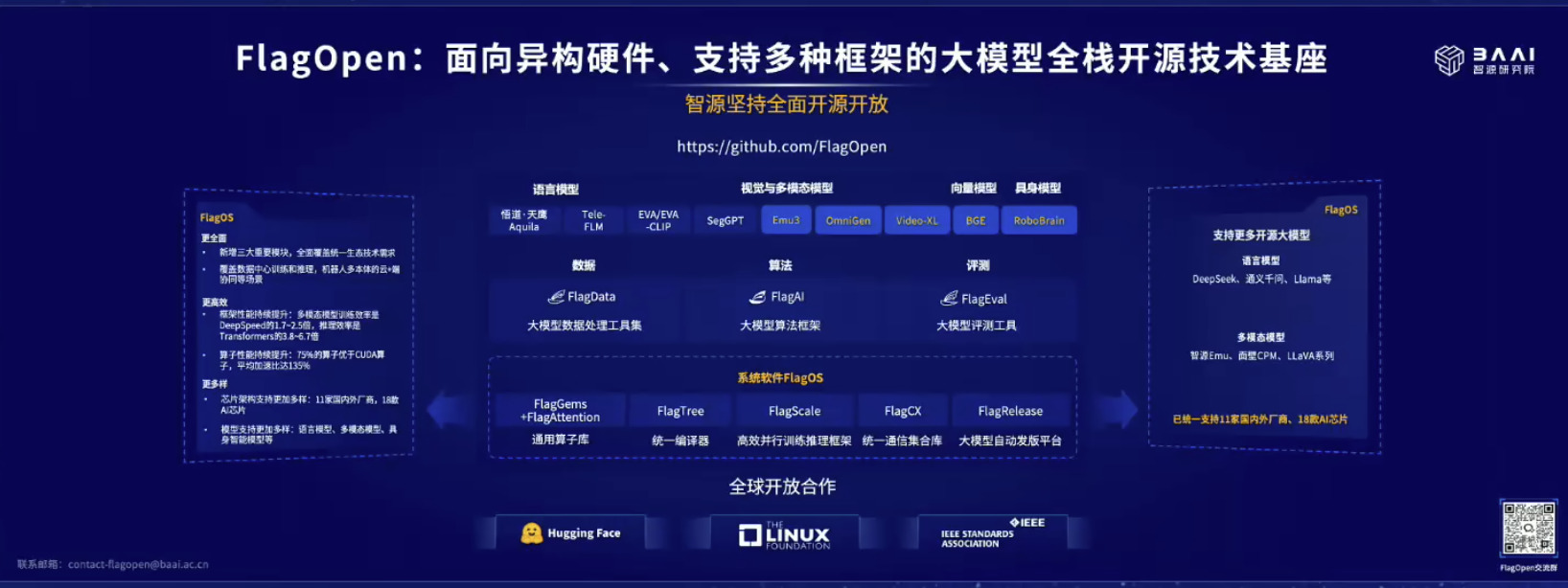
本文档概述了北京智源人工智能研究院 (BAAI),一个致力于推动人工智能原始创新的新型研发机构。它详细介绍了 BAAI 的发展历程,从2018年成立至今,以及其在大型人工智能模型领域取得的重大进展,包括推出 FlagOpen 开放平台。此外,来源还介绍了 BAAI 在具身智能和生命科学等前沿领域的具体研究成果,例如 RoboOS 2.0 和 OpenComplex2。整体而言,这份资料展现了 BAAI 在构建通用人工智能、推动开放生态以及解决现实世界问题方面的努力和愿景。