2025 年大模型实践总结
具身智能
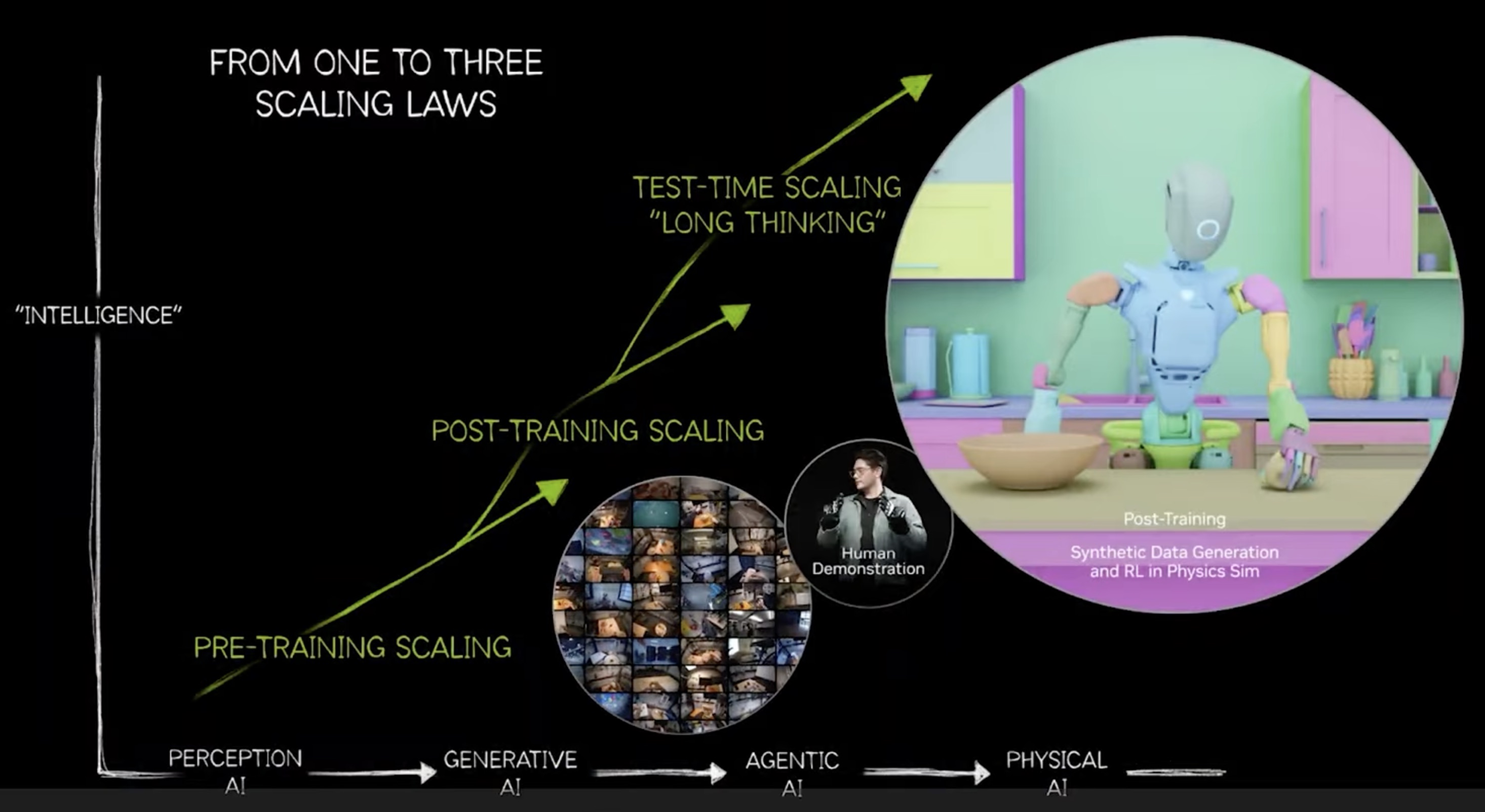
Scaling Laws
全链路解决方案
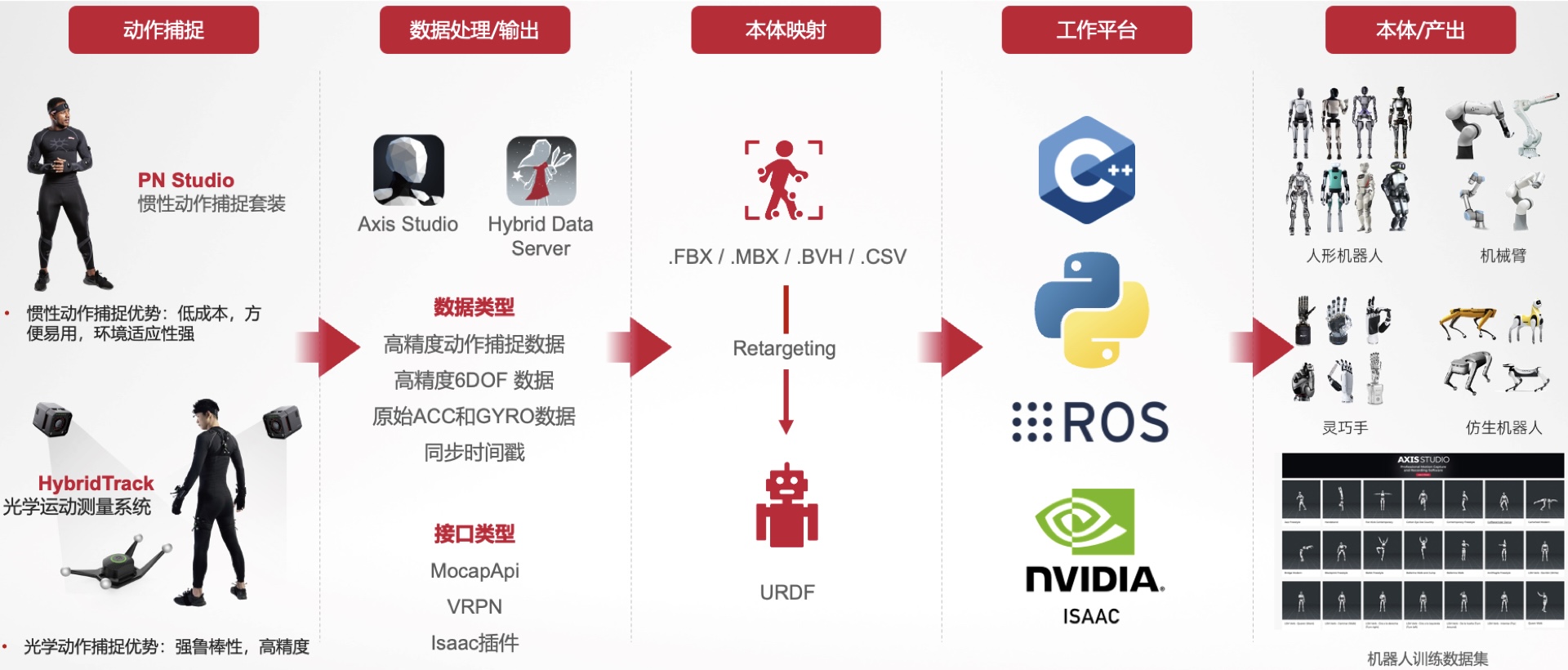
1. 动作捕捉
这一阶段负责采集人类的原始动作数据。图中列出了两种主要技术:
- PN Studio (惯性动捕): 利用惯性传感器套件。优点是成本低、易用、环境适应性强。
- HybridTrack (光学动捕): 利用摄像头和标记点。优点是鲁棒性强、精度极高。
2. 数据处理/输出
捕捉到的信号通过 Axis Studio 或 Hybrid Data Server 进行初步处理。
- 数据类型: 包括高精度动捕数据、6DOF(六自由度)数据、原始加速度(ACC)和陀螺仪(GYRO)数据,以及同步时间戳。
- 接口类型: 支持 MocapApi、VRPN 以及专门的 Isaac 插件。
3. 本体映射
这是将人类动作转化为机器人动作的关键步骤。
- 输入格式: 常见的 3D 动画格式,如
.FBX、.MBX、.BVH和数据格式.CSV。 - 重定向 (Retargeting): 通过算法将人类的骨架运动映射到机器人的 URDF(统一机器人描述格式)模型上,确保动作符合机器人的物理结构约束。
4. 工作平台
展示了开发和仿真所使用的核心软件生态:
- 编程语言: C++ 和 Python。
- 中间件: ROS (Robot Operating System),用于机器人控制。
- 仿真环境: NVIDIA ISAAC,一个强大的机器人仿真和人工智能训练平台。
5. 本体/产出