跨本体具身大小脑协作框架 RoboOS
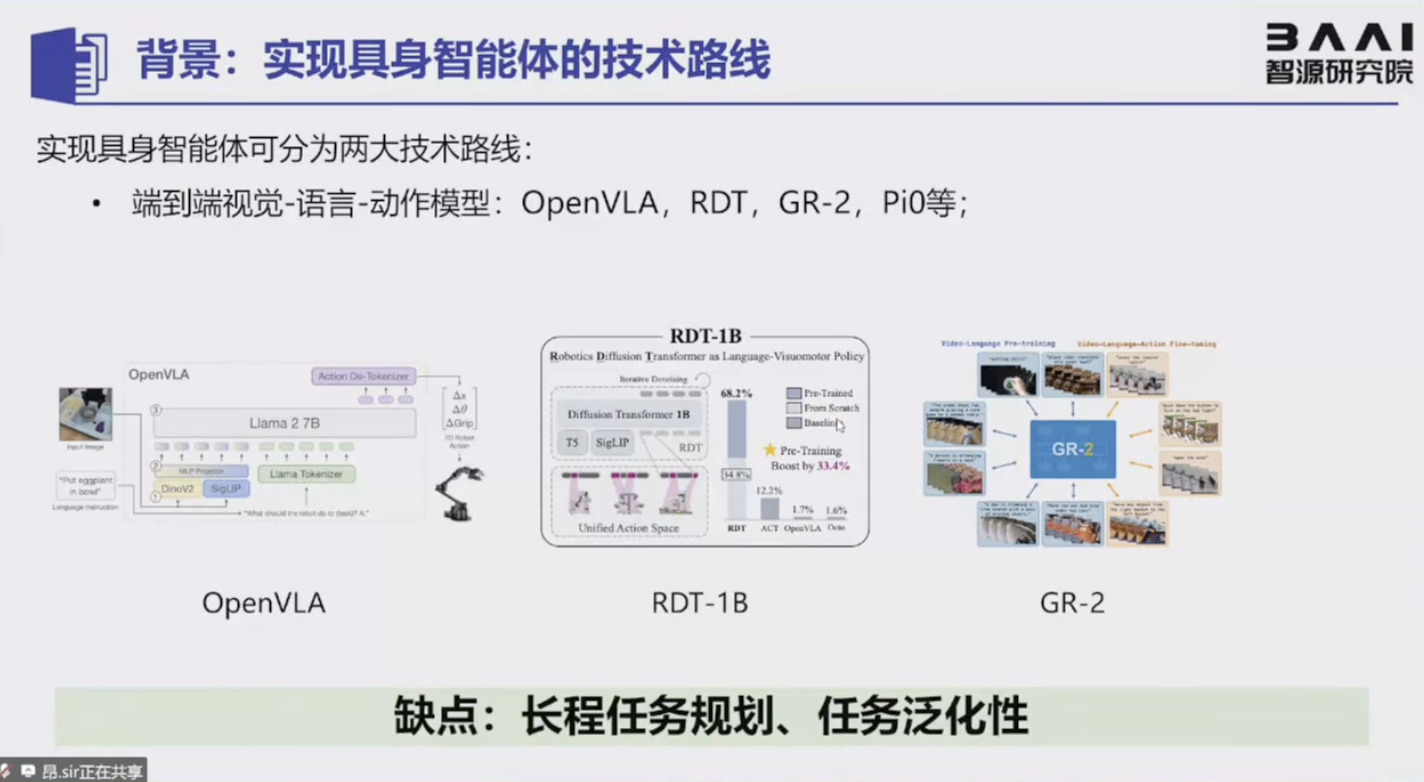
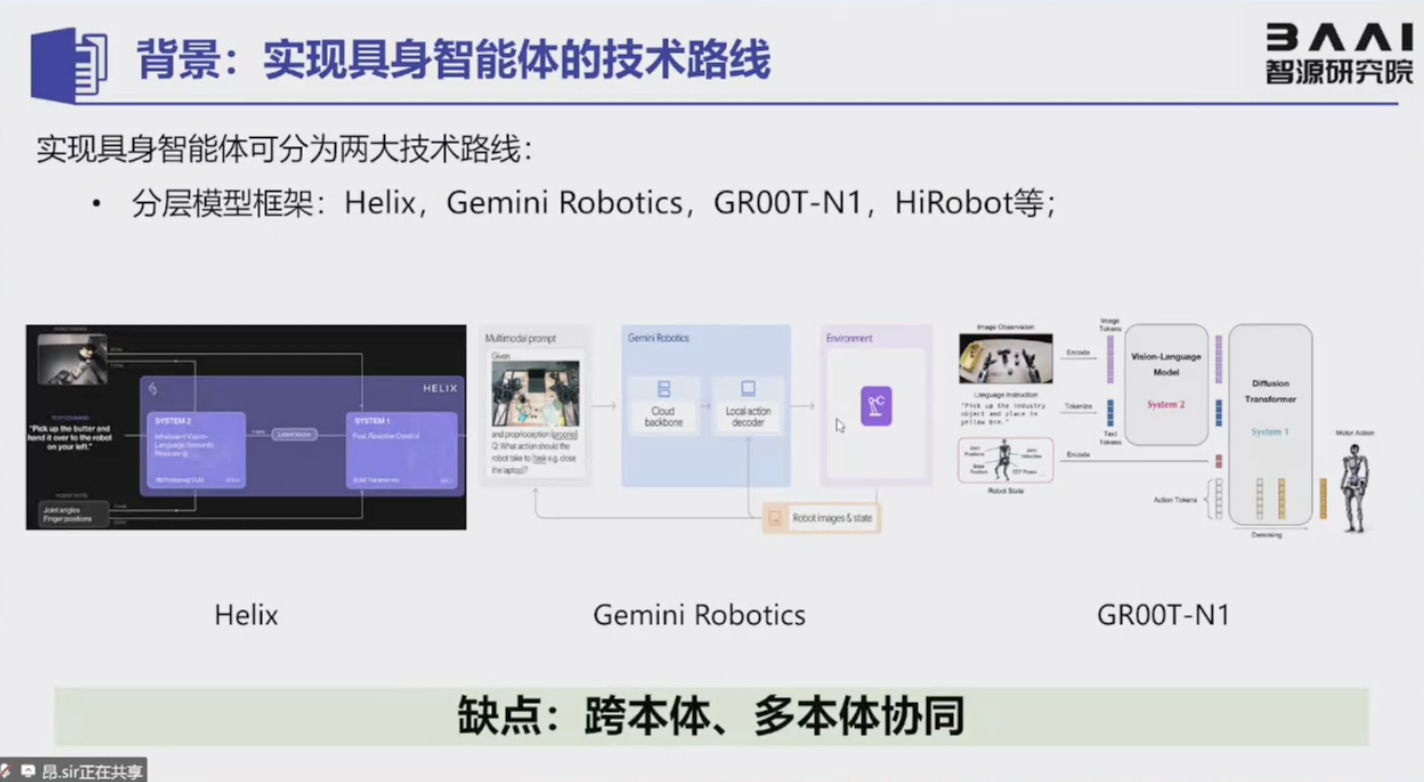
本文档介绍了 RoboOS,一个用于跨本体具身大小脑协作的框架。它首先概述了具身智能体的现有技术路线及其局限性,例如:在长程任务规划和跨本体协作方面的不足。该框架通过 “具身大脑”(负责全局感知与决策)和 “具身小脑”(提供即插即用的技能库)实现多本体协作控制。文档还重点说明了共享记忆系统在空间和时间维度上的数据中心化,以及云端协同如何支持多机器人、多任务场景,并展示了自定义微调集以提高任务分解和执行的准确性。
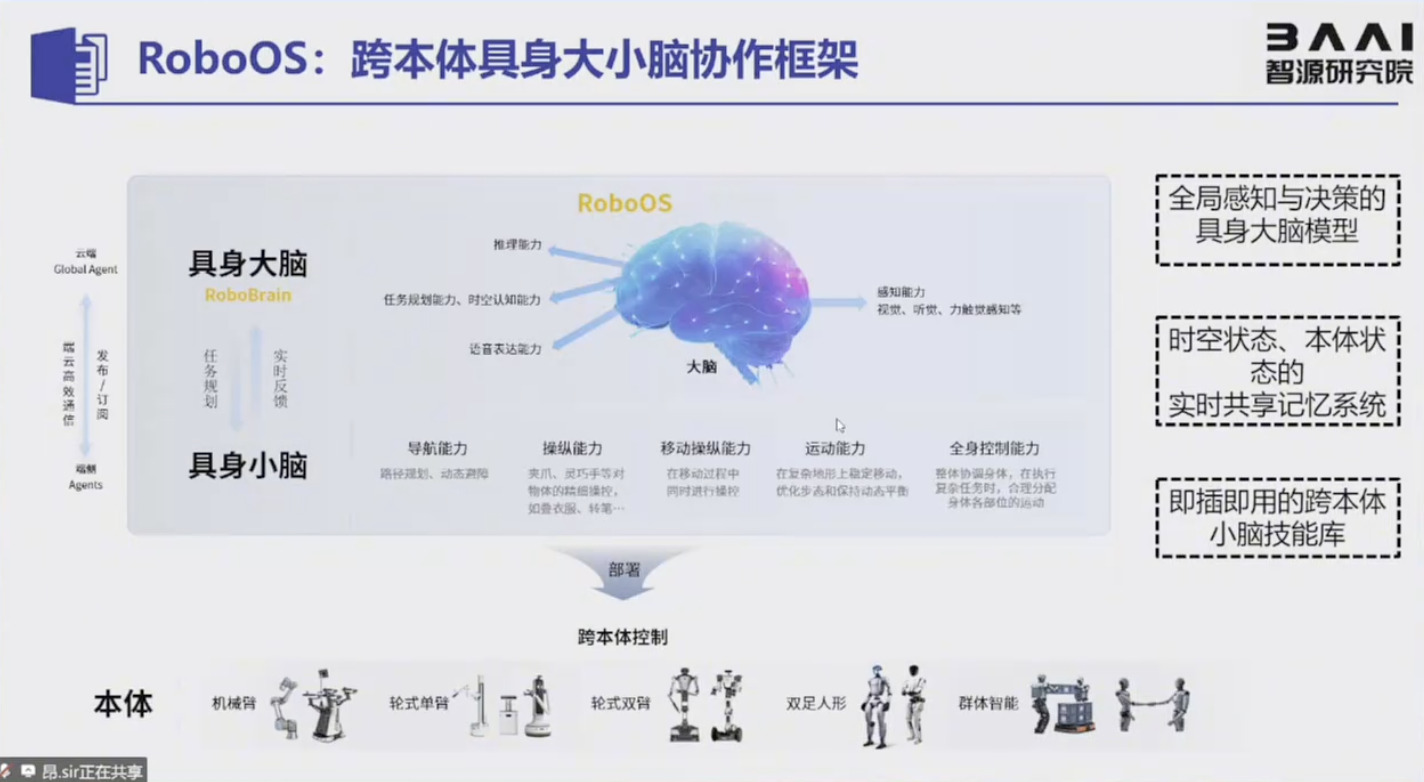
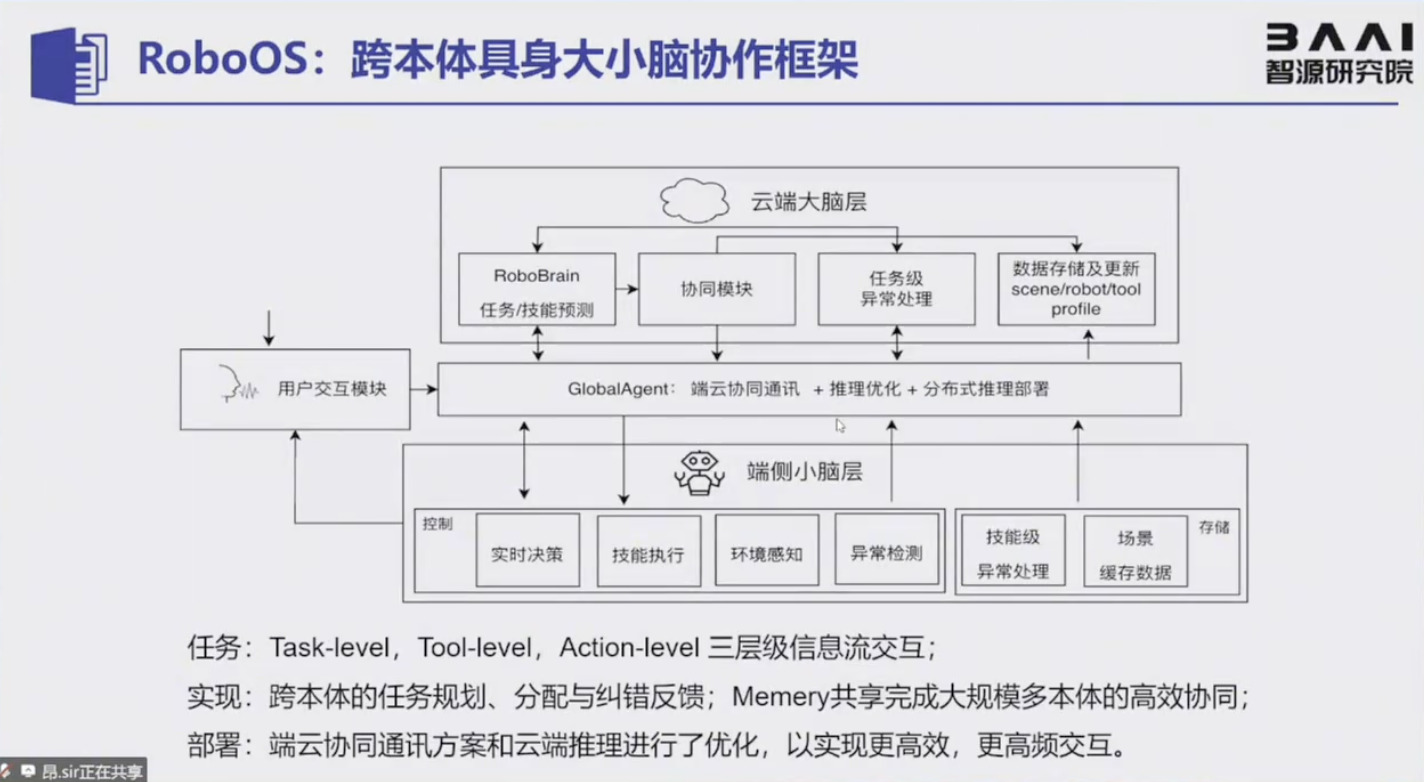
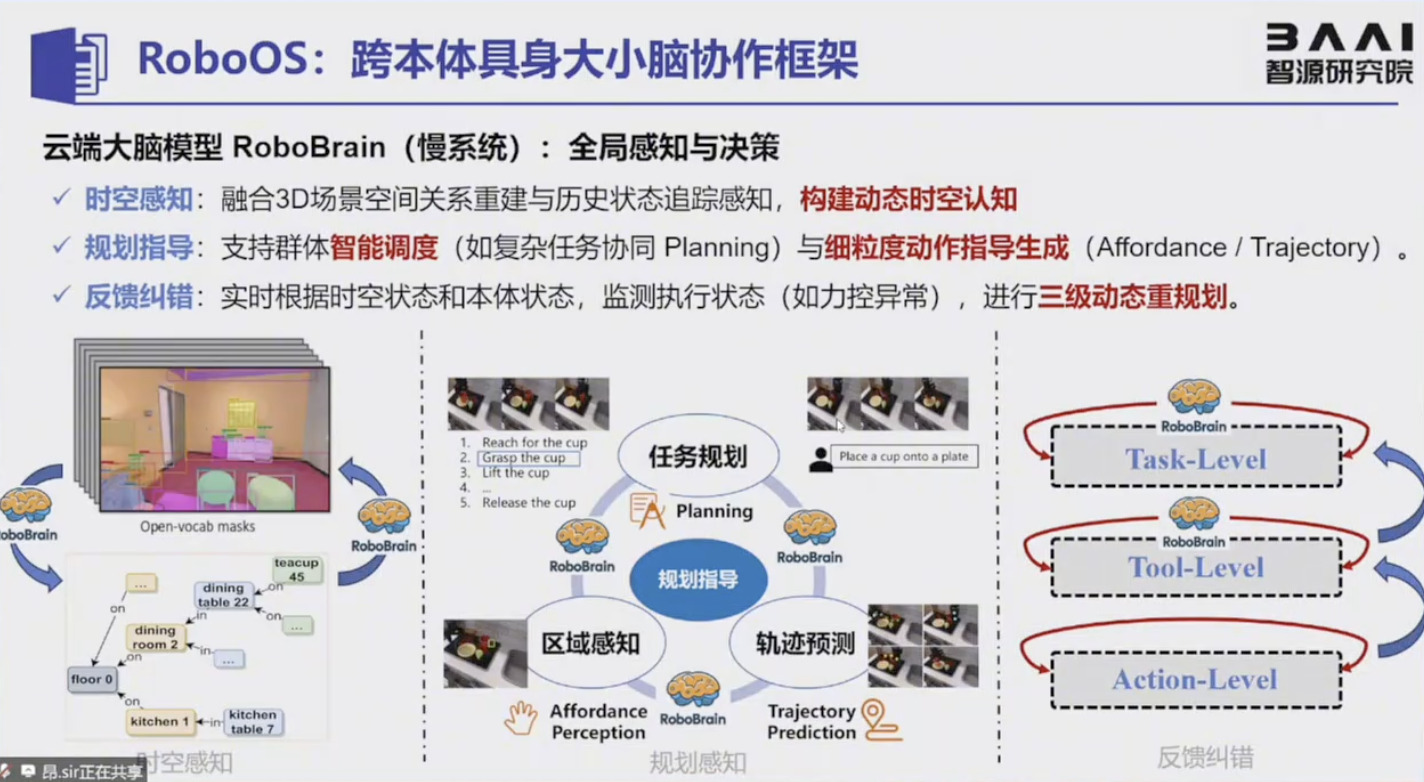
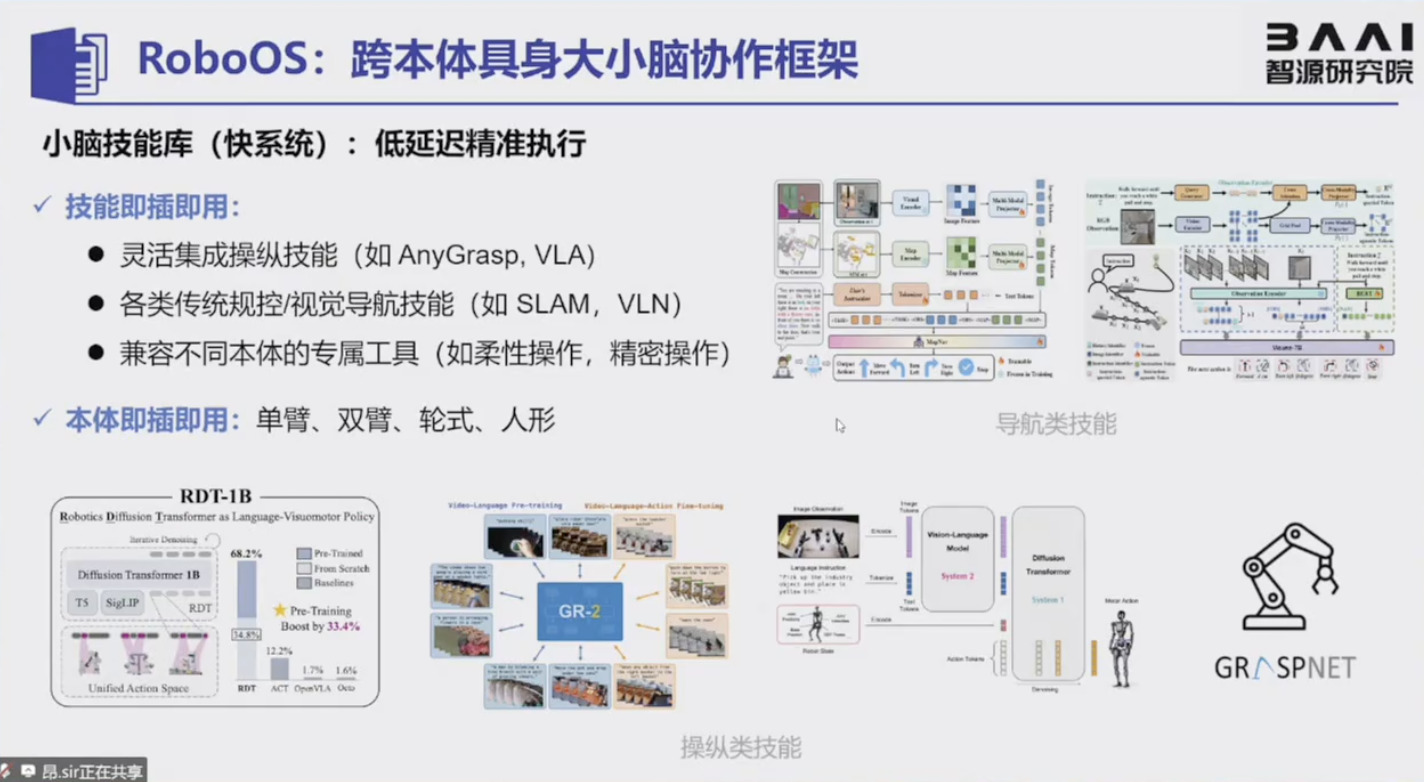
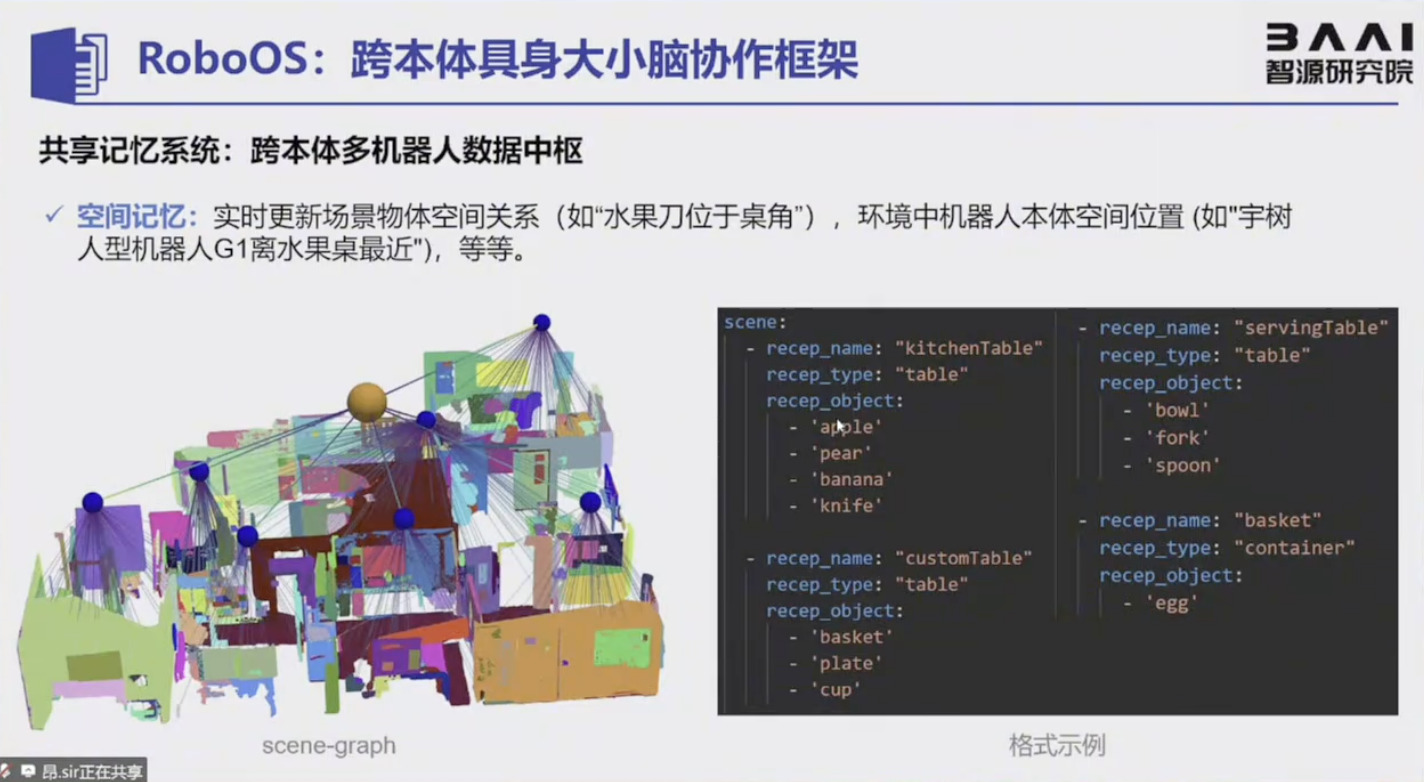
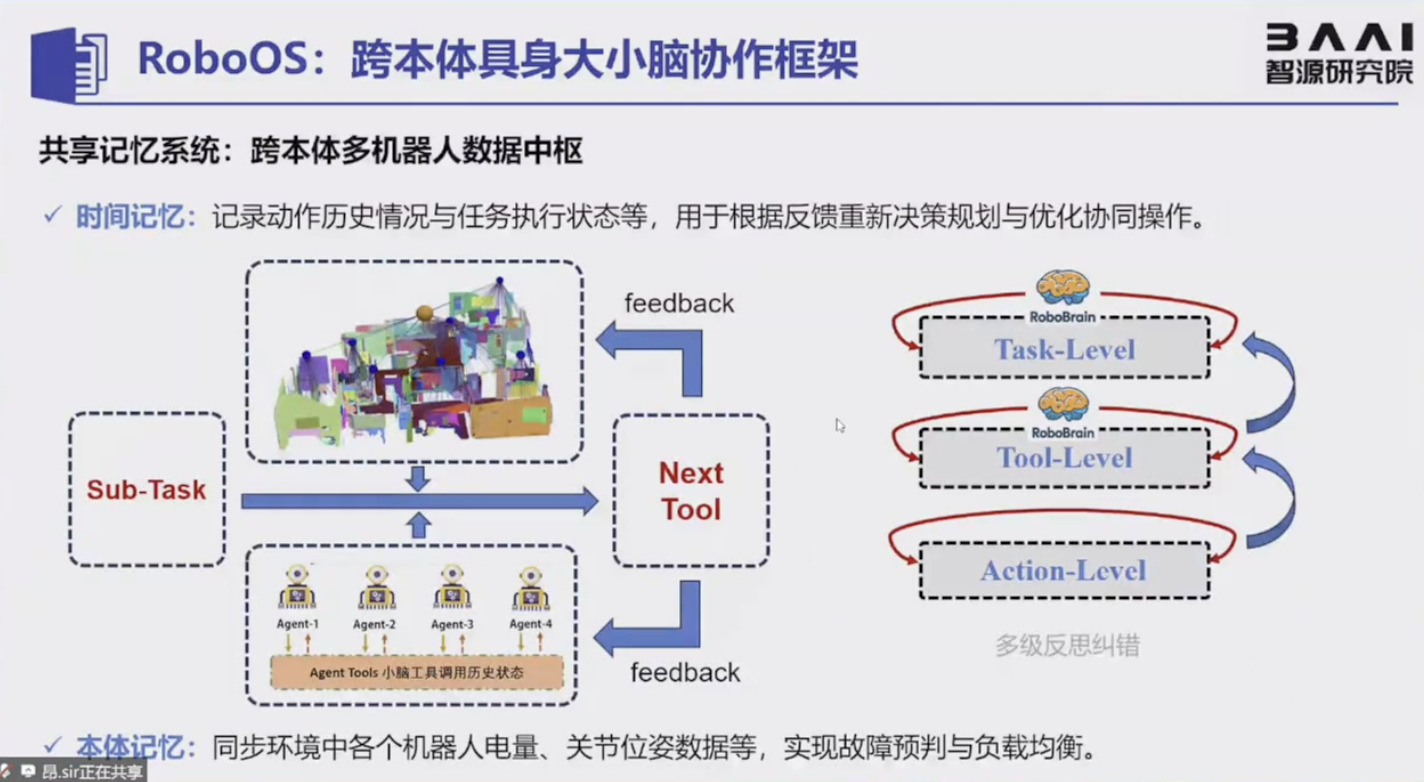
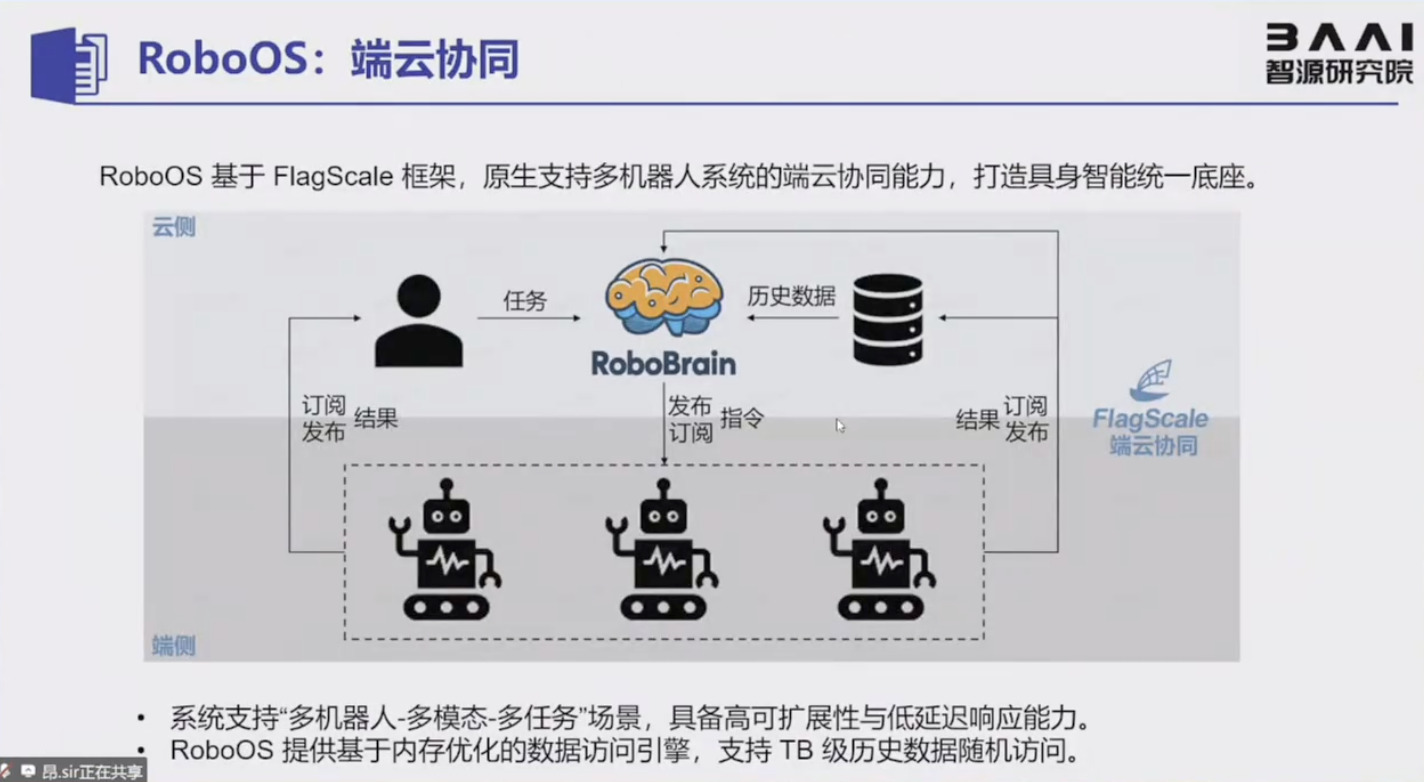
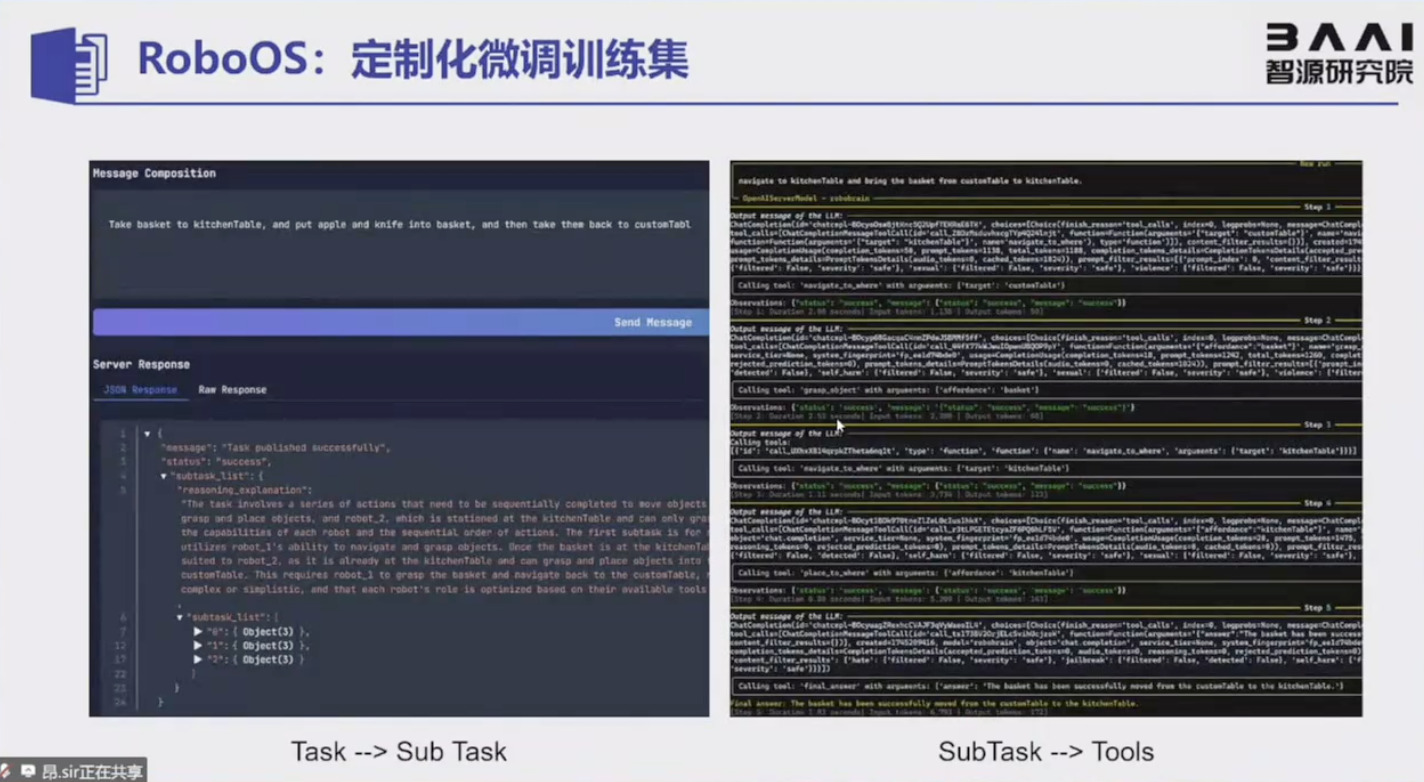
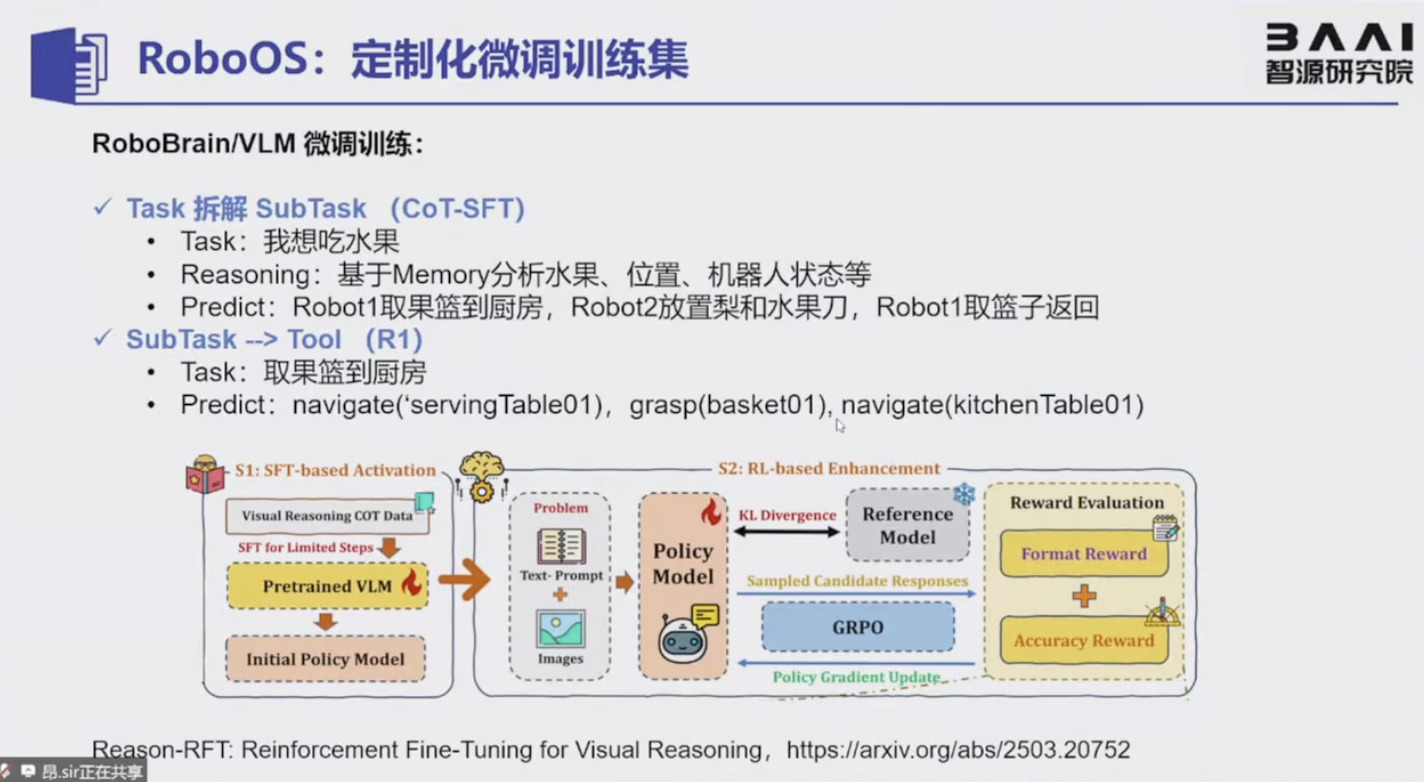

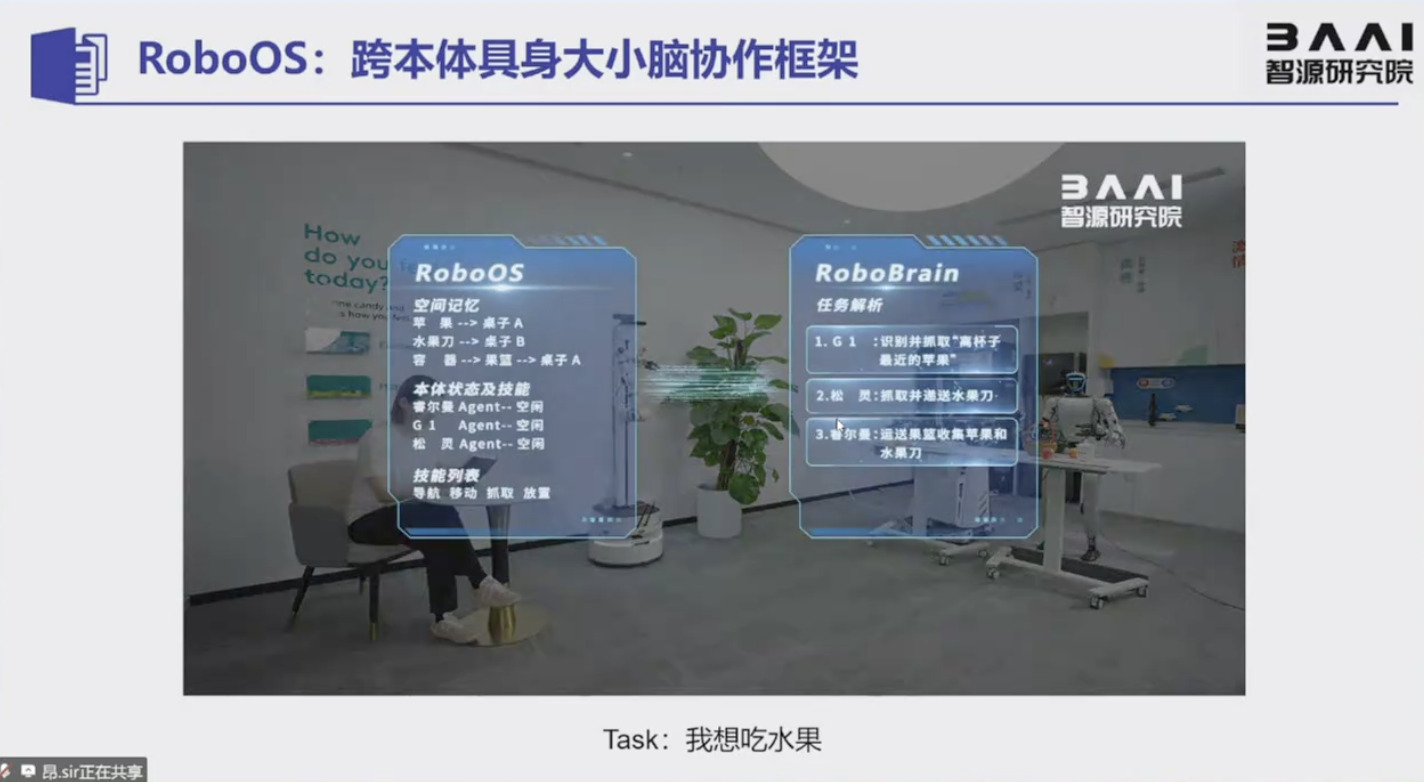


本文档介绍了 RoboOS,一个用于跨本体具身大小脑协作的框架。它首先概述了具身智能体的现有技术路线及其局限性,例如:在长程任务规划和跨本体协作方面的不足。该框架通过 “具身大脑”(负责全局感知与决策)和 “具身小脑”(提供即插即用的技能库)实现多本体协作控制。文档还重点说明了共享记忆系统在空间和时间维度上的数据中心化,以及云端协同如何支持多机器人、多任务场景,并展示了自定义微调集以提高任务分解和执行的准确性。