飞行机器人—从物理智能到具身智能
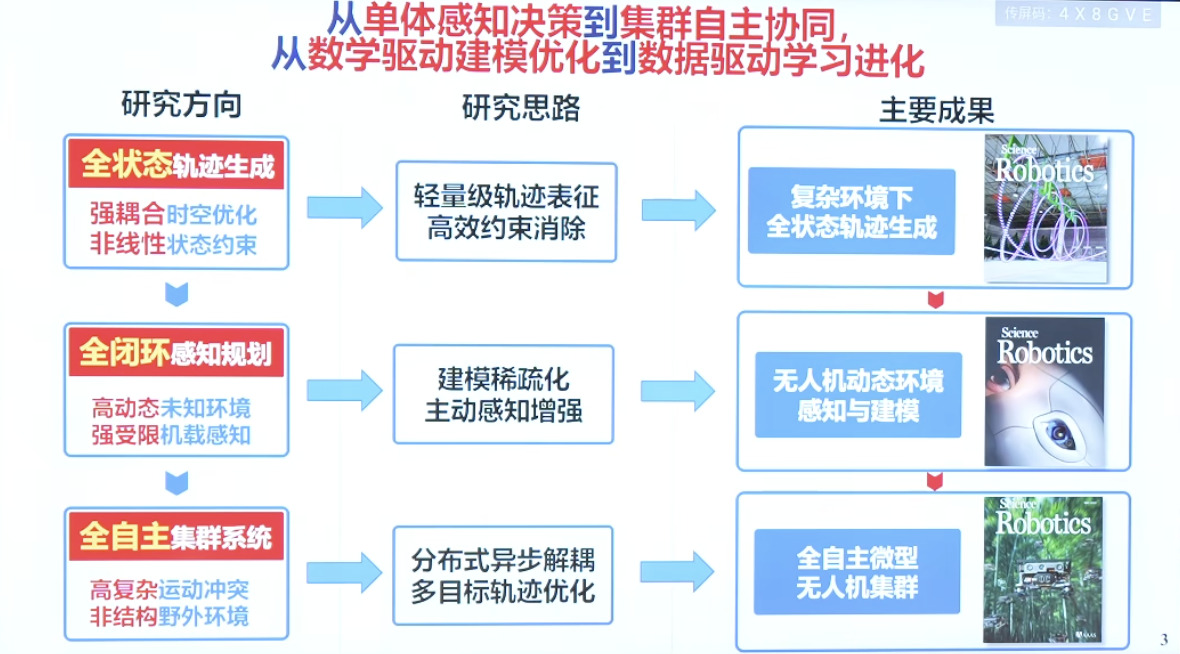
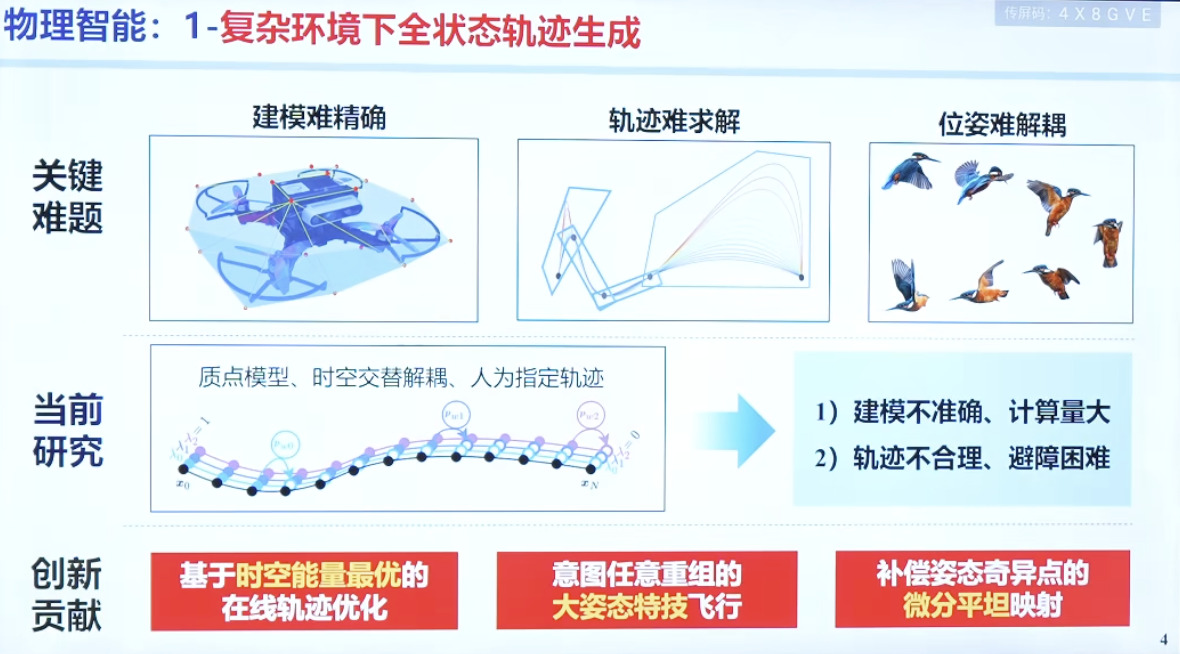
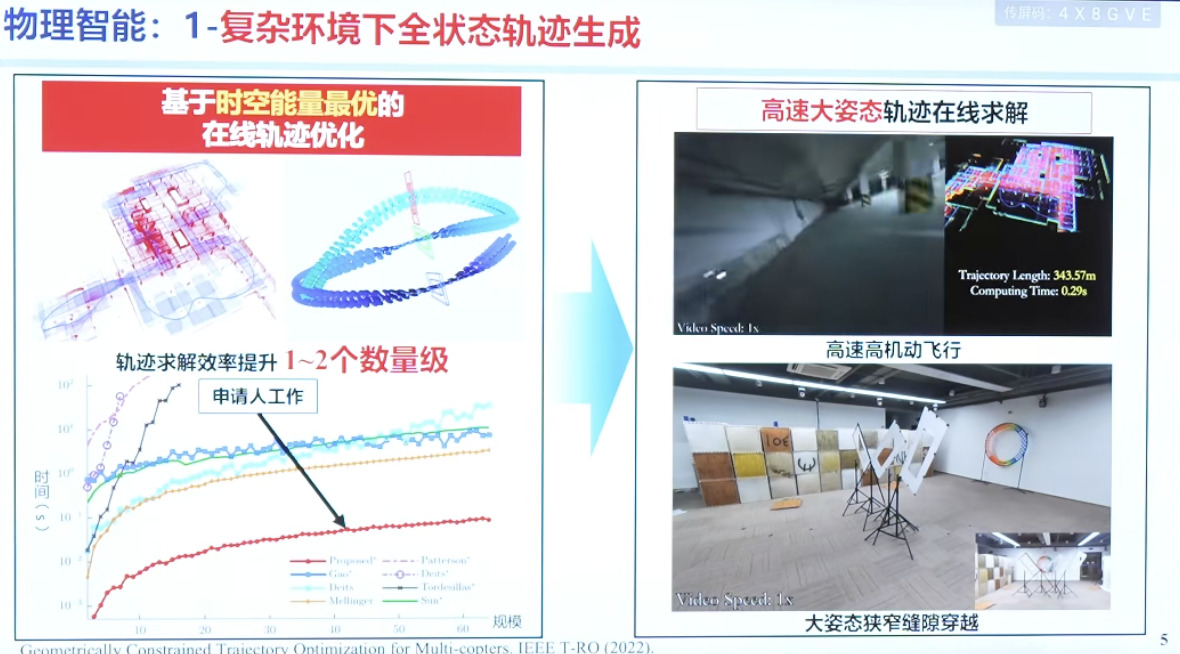
该幻灯片介绍了飞行机器人从物理智能到具身智能的演变。概述了飞行机器人的研究方向,包括在复杂环境下生成全状态轨迹、无人机动态环境感知与建模,以及全自主微型无人机集群。幻灯片还展示了如何通过创新方法克服关键挑战,例如优化在线轨迹生成和开发低延迟动态感知系统。最后,它描绘了飞行机器人技术未来的发展路径,强调了从数学驱动到数据驱动的转变,以实现更强大的具身智能和涌现智能。

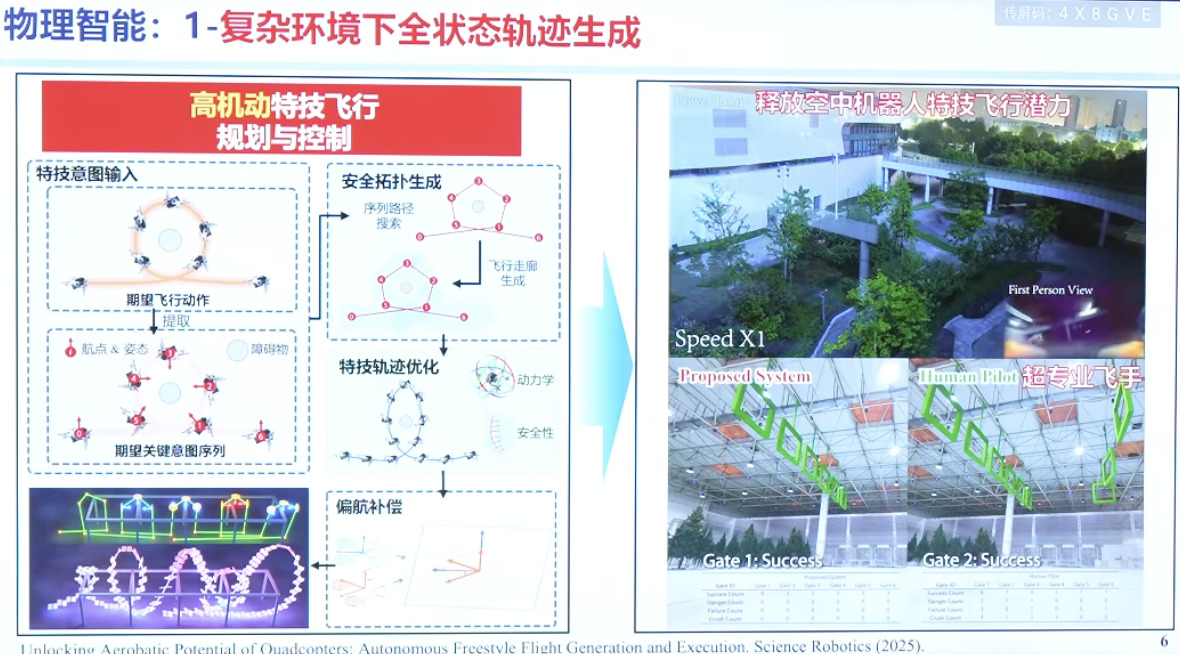
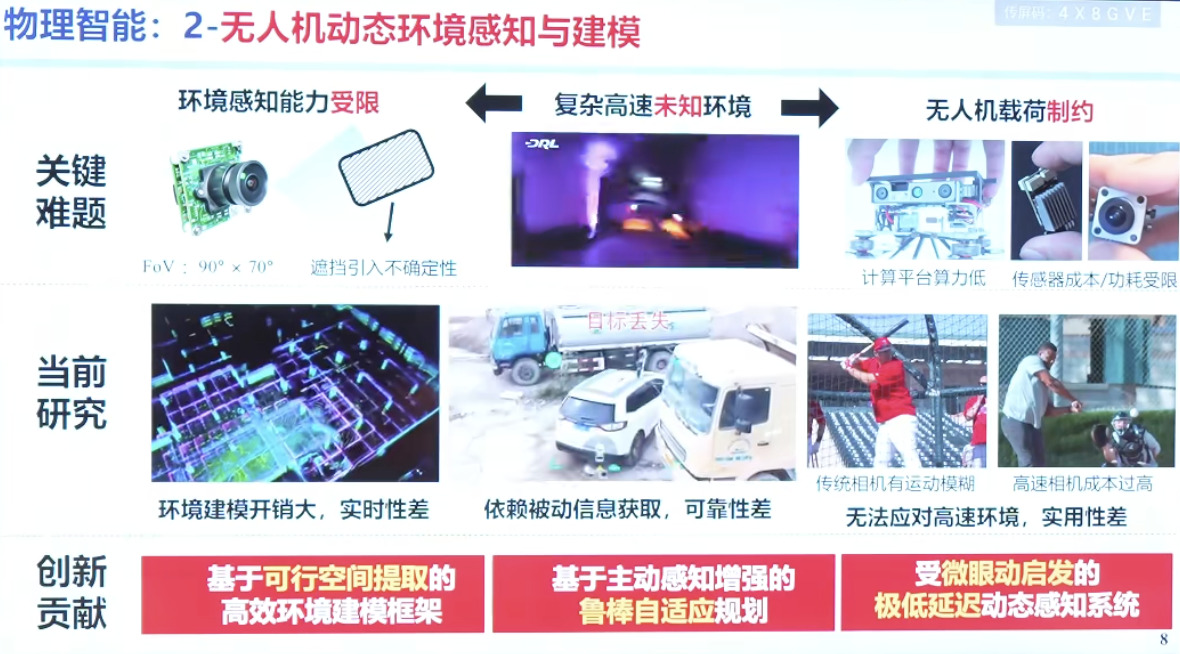

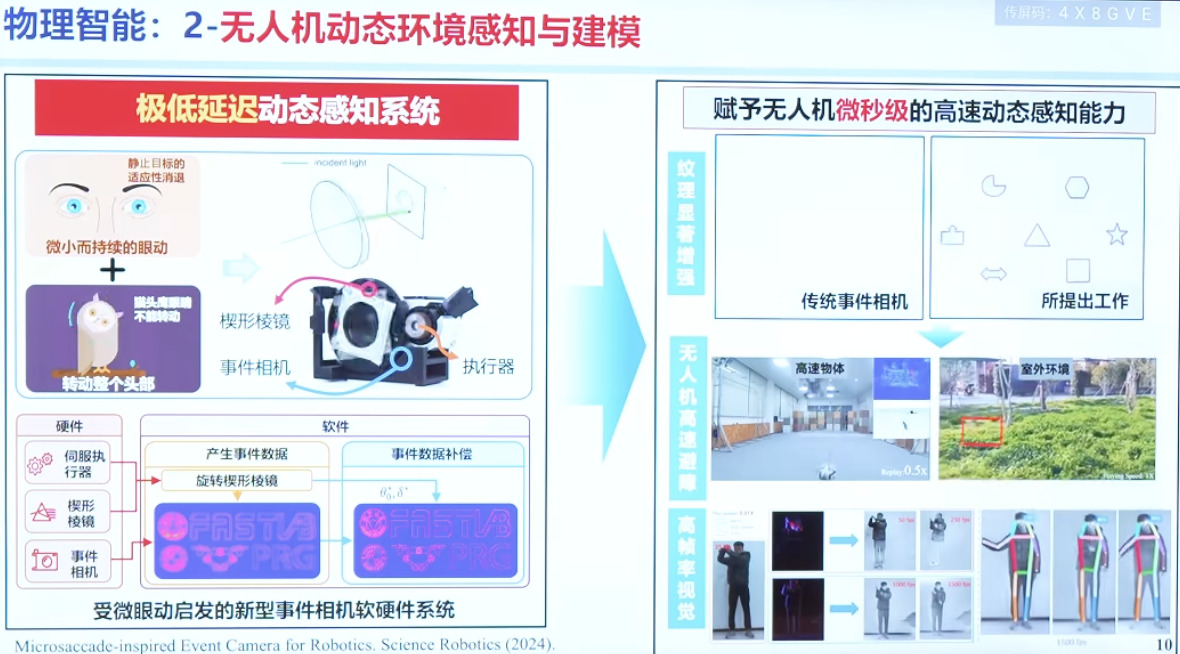
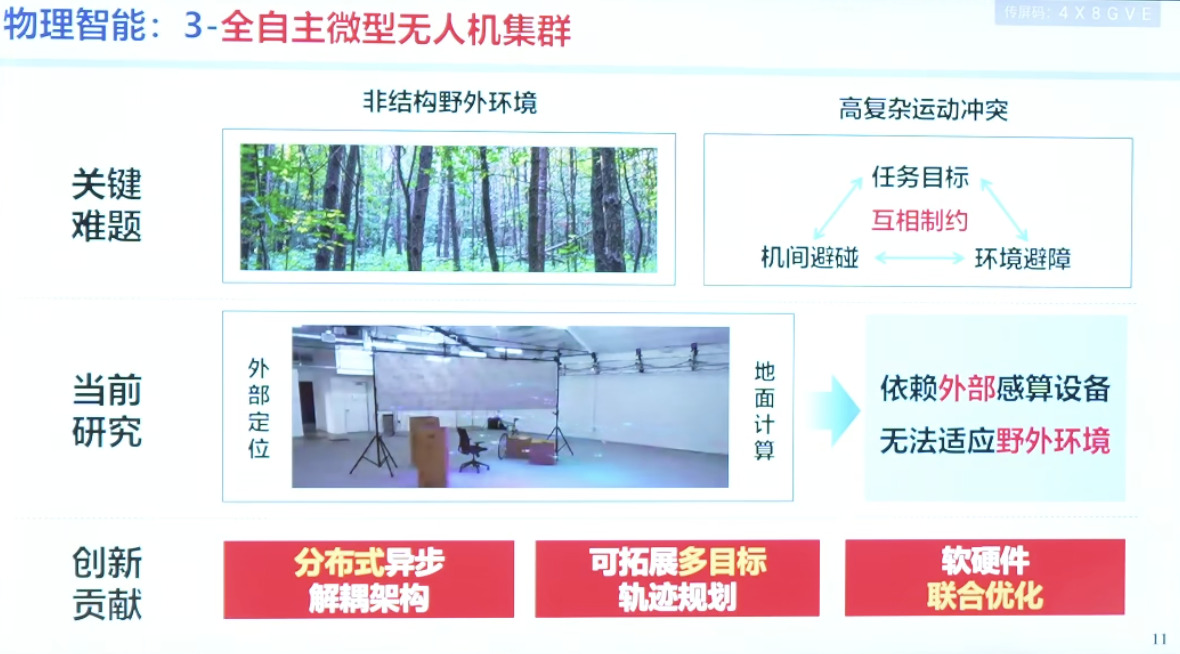
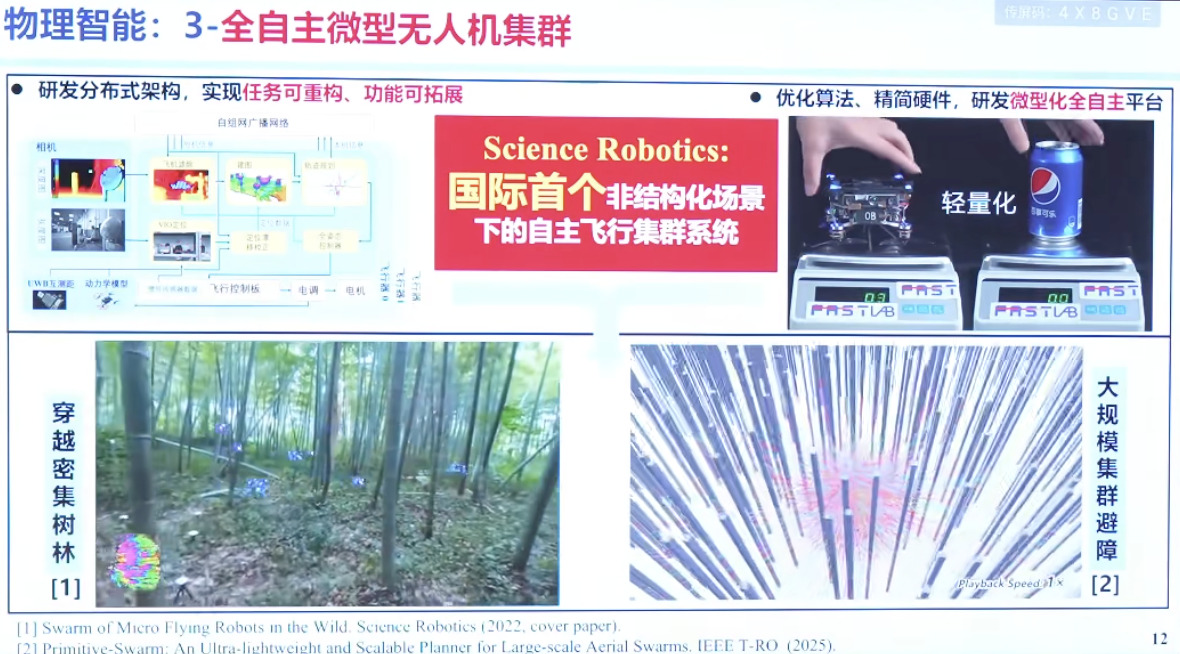






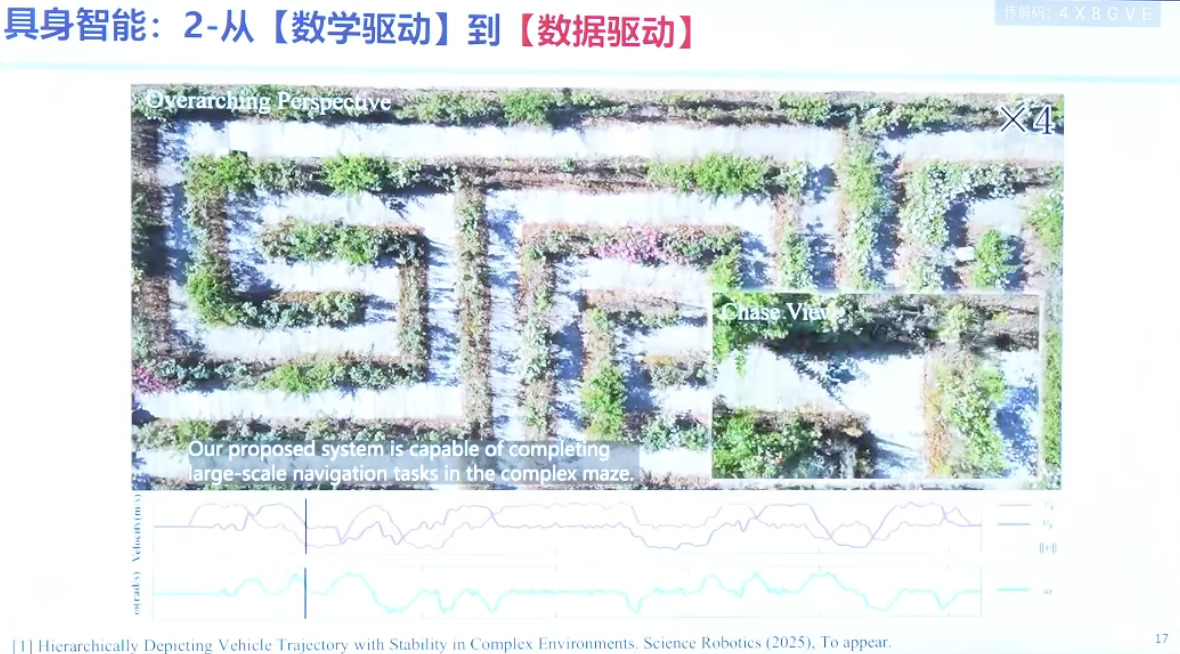


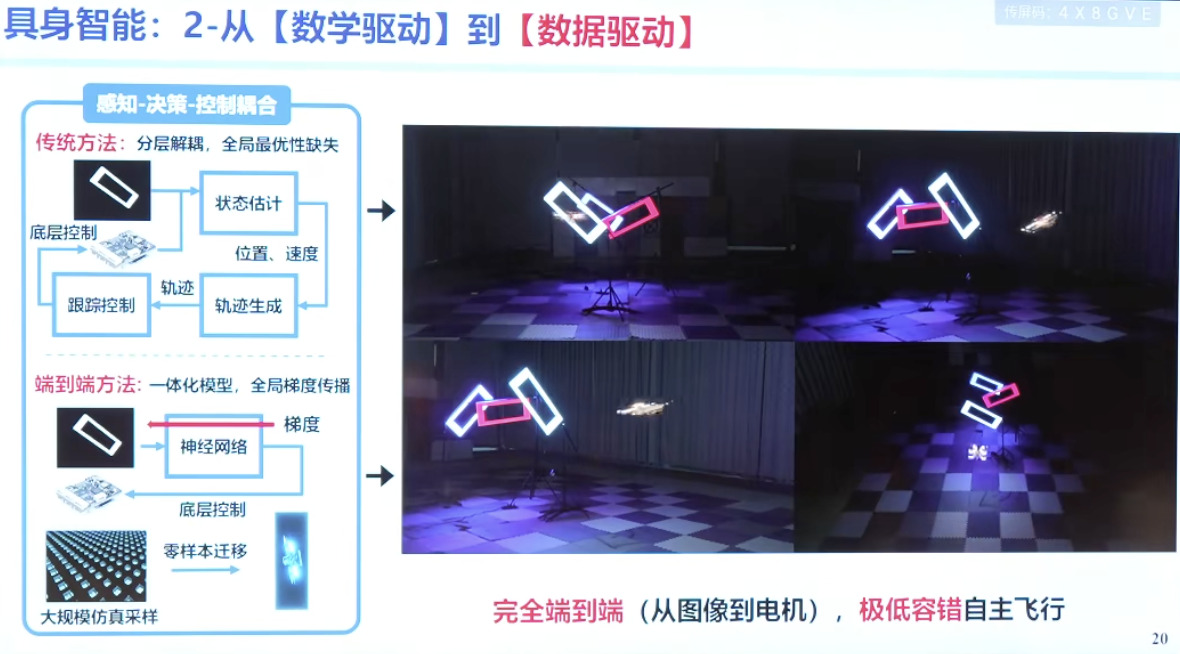
该幻灯片介绍了飞行机器人从物理智能到具身智能的演变。概述了飞行机器人的研究方向,包括在复杂环境下生成全状态轨迹、无人机动态环境感知与建模,以及全自主微型无人机集群。幻灯片还展示了如何通过创新方法克服关键挑战,例如优化在线轨迹生成和开发低延迟动态感知系统。最后,它描绘了飞行机器人技术未来的发展路径,强调了从数学驱动到数据驱动的转变,以实现更强大的具身智能和涌现智能。